Системы технического зрения для робототехнических приложений значительно изменились за последнее десятилетие. Подобные технологии старого образца отличались ненадежностью, громоздкостью и дороговизной. Современные аналоги оставили все эти недостатки в прошлом, и уже сегодня, демонстрирует ощутимую разницу в эффективности применения.
Предлагаем рассмотреть 5 мифов о современном техническом зрении и попытаться найти истину в широко известных утверждениях:
Миф №1: Техническое зрения сложно в освоении
В действительности, современные системы технического зрения очень просты в установке и использовании. Большинство алгоритмов, коммуникации и параметров встроены заранее, что позволяет быстро и легко вносить необходимые корректировки без помощи квалифицированного инженера. Новые пользователи будут приятно удивлены присущей простоте в использовании и обслуживании систем.
Правда, это относится лишь к стандартным и отработанным приложениям, например предназначенным для роботизации сварки при слижении за швами или автоматизации сортировки/перемещении при необходимости точной фиксации формы и положения движущихся предметов.
Но, когда речь заходит про нестандартные адаптивные решения в сложных и изменчивых условиях, тут вступают в силу другие законы. В подобных ситуациях, важен конкретный — прикладной опыт и знания интегратора роботов занятого внедрением технологии.
Миф №2: Системы технического зрения ненадежны
Если применение технического зрения обеспечивается надлежащим образом, она сохранит свой функционал прочности и надежности на долгие годы. На сегодняшний день составляющие компоненты подобного оборудования отличаются высокой прочностью не зависимо от условий эксплуатационной среды. Зачастую, они специально создаются для работы в сложных промышленных условиях. В отличие от человека, сенсорные технологии никогда не устают, не берут перерыв для восстановления и вечером не уходят домой. Класс защиты современных сканеров и систем технического зрения очень высок, в среднем он находится на уровне IP54.
Миф №3: Все системы технического зрения универсальны и практически одинаковы
Не существует единого готового технического зрения сразу для всех технологических решений требующих автоматизацию и роботизацию. Большинство систем являются уникальным и «заточенными» под узкую задачу.
Тот, кто утверждает, что есть универсальный сенсорный модуль/блок по типу «подключи и работай» для реализации любых задач, либо не понимает о чем он говорит, либо не знает и не разбирается в предмете дискуссии.
Миф №4: Системы технического зрения – всегда лучшее решение
В то время как системы обработки данных визуального контроля являются полезными во многих робототехнических приложениях, встречается ряд факторов, которые могут препятствовать их эффективному применению. Например — работа в ограниченных пространствах. Зачастую сканеры и другие системы технического зрения размещаются непосредственно на «руке» робота, это может стать проблемой, когда конструкция обрабатываемых изделий не позволит проникать в труднодоступные зоны.
Кроме этого, несмотря на то, что с точки зрения скорости обработки данных современные образцы технического зрения с каждым годом становятся все более производительными, современные производства также не стоят на месте и регулярно поднимают скоростную планку. Это также может стать ограничением в использовании технического зрения, так как в постобработке данных принимает участие контроллер робота или ЧПУ, что не играет в пользу сокращения общего временного цикла.
Миф №5: Системы технического зрения – слишком дорогостоящее решение
Всего 10 лет назад самые простые, или другими словами классические системы технического зрения стоили в среднем около $30 000. На сегодняшний день стоимость подобных технологий может составлять от $5 000 до $15 000. Эволюция технологий и нарастающая конкуренция в области машинного зрения привела к значительному снижению стоимостных показателей. Но данная тенденция распространяется лишь на стандартные системы, созданные и отработанные для конкретного узкого применения.
Как только речь зайдет о нестандартном роботизированном решении, связанном с использованием технического зрения и требующего автоматической адаптивности в быстро изменчивой среде, стоимость сразу вырастет на порядок! В подобных ситуациях, важно найти квалифицированного интегратора роботов имеющего опыт решения подобных задач.
Сегодня, интеграция систем технического зрения в роботизированные комплексы обеспечивает конкурентные преимущества многим производителям, позволяя оптимизировать выполняемые процессы и добиваться максимальной выгоды. Современные тенденции развития отрасли укрепляют уверенность, что за подобными технологиями стоит будущее, а количество мифов и заблуждений о техническом зрении в робототехнике будет с каждым годом уменьшаться.










Мошкин Владимир Иванович
Петров Андрей Александрович
Титов Виталий Семенович
Якушенков Юрий Григорьевич
ТЕХНИЧЕСКОЕ ЗРЕНИЕ РОБОТОВ
ПРЕДИСЛОВИЕ
Решение актуальных задач автоматизации производства с учетом ускорения темпов научно-технического прогресса требует серьезной перестройки существующей структуры отечественного парка промышленных роботов. Наряду о преобладающими сегодня простейшими промышленными роботами, функционирующими по жестким (не меняющимся в процессе работы) программам, в широкую практику должны войти робототехнические системы качественно иного класса, обладающие адаптивными возможностями и элементами искусственного интеллекта. Адаптивные роботы, снабженные различными средствами очувствления — сенсорными системами и способные гибко перестраивать свои действия в соответствии с воспринимаемой информацией о рабочей среде, являются одним из важнейших компонентов гибких производственных систем (ГПС), без них немыслима роботизация непромышленной сферы, проведение многих работ в космосе, под водой и в других экстремальных средах.
При создании адаптивных роботов весьма существенная роль среди возможных средств очувствления отводится системам технического зрения (СТЗ), обеспечивающим восприятие видеоинформации об окружающей среде, автоматическую обработку и анализ изображений рабочих сцен в целях формирования команд управления роботом в процессе его работы. В настоящее время во всем мире расширяется серийный выпуск самых различных СТЗ, активно ведутся разработки новых методов и средств визуального очувствления роботов. В нашей стране этими проблемами занимается целый ряд научных центров и предприятий Москвы, Ленинграда, Киева, Томска, Рыбинска, Ростова-на-Дону и других городов.
Вопросы создания и применения СТЗ роботов интересуют многих специалистов, причастных к проектированию, внедрению и эксплуатации роботизированных технологических комплексов и ГПС. Хотя советскими издательствами за последнее время выпущено несколько оригинальных и переводных книг и сборников, в которых затрагиваются отдельные аспекты теории, построения и использования СТЗ роботов (см. например [9, 30, 34, 39, 40, 41, 43, 47, 49]), существенная часть информации по этой
проблеме остается недоступной широкому кругу читателей, поскольку сосредоточена в узкоспециализированных периодических изданиях (в большинстве своем — на иностранных языках), материалах зарубежных фирм и международных выставок, трудах множества конференций, таких, как Международные конференции по техническому зрению и управлению очувствленными роботами ROVISEC, тематические симпозиумы международных федераций по промышленным роботам, технологии промышленного производства, автоматическому управлению, обработке информации и др. Если учесть, что значительное число разработчиков и пользователей робототехнических систем ранее не были профессионально знакомы с проблемами технического зрения, становится очевидной потребность в систематизированном изложении современных принципов построения, основ проектирования, алгоритмического и программного обеспечения СТЗ роботов различного назначения, методов использования видеоинформации для управления роботами, а также необходимость в рассмотрении примеров эффективного практического применения роботов о техническим зрением, перспектив развития этого научно-технического направления.
Разработчики СТЗ роботов во многом опираются на опыт более традиционных применений технического зрения в устройствах промышленной автоматики и телемеханики, телевидении, дефектоскопии, при обработке фотоснимков, изображений биологических препаратов, текстов и т. п. В ряде случаев удается использовать те или иные из созданных ранее технических средств, методических решений, алгоритмов и программ или же приспособить их к задачам робототехники с небольшой модификацией. Однако часто специфика робототехнических приложений не позволяет непосредственно воспользоваться накопленным арсеналом методов и средств и требует развития оригинальных подходов к созданию СТЗ о учетом новых функциональных задач, конкретных возможностей реализации и условий работы в составе робототехнических систем.
В связи о этим при написании данной книги представлялось целесообразным рассмотреть проблему в обоих аспектах. С одной стороны, считая датчики внешней видеоинформации робота (видеосенсоры) частным случаем более широкого класса оптико-электронных приборов (ОЭП), авторы стремились сохранить преемственность общих методов, принятых при проектировании ОЭП, показать возможность распространения на случай СТЗ роботов целого ряда хорошо зарекомендовавших себя принципов расчета, выбора структурных и функциональных схем, элементной базы. Это позволило опустить подробное описание многих традиционных процедур, адресовав читателя к известной литературе по ОЭП.
С другой стороны, особое внимание уделено недостаточно освещенным в этой литературе вопросам, которые характерны именно для СТЗ роботов: обеспечению универсальности и повышенной
степени гибкости, высокого быстродействия, устойчивости к воздействиям окружающей среды, необходимости миниатюризации и ориентации на широкодоступную элементную базу, совместимости с существующими устройствами управления роботов и т. п. В то же время в книге сделана попытка обобщить методы выбора и расчета основных типовых блоков, необходимых для визуального очувствления робота вне зависимости от его конкретного назначения. На основе единого системного подхода рассмотрены требования к организации рабочей сцены робота с СТЗ, видеосенсорам, включающим оптическую систему, преобразователь оптической информации о наблюдаемой сцене в соответствующий электрический сигнал (видеосигнал), электронный тракт предварительной обработки этого сигнала, блокам ввода изображений в вычислительное устройство, их обработки, сегментации, описания и анализа, а также связи СТЗ о системой управления робота. При изложении путей реализации этих требований упор делается на необходимость рационального сочетания аппаратных и программных средств.
Научно-технический уровень разработок СТЗ роботов в мире повышается очень высокими темпами, их элементная база постоянно обновляется — этим объясняется сравнительно малый объем, отводимый в книге описанию используемых сегодня элементов и специальных технических решений в конкретных применениях. Авторам хотелось избежать описательности и перечисления характеристик и особенное: л многочисленных СТЗ, созданных в нашей стране и за рубежом, что свойственно некоторым книгам, вышедшим в последнее время.
Главная цель настоящей книги — дать одно из первых пособий разработчикам СТЗ роботов ближайшего будущего и помочь специалистам, которым предстоит применять их для решения разнообразных практических задач.
Книгу написали: В. И. Мошкин (пп. 3.1, 3.4, 4.3, 4.4, 5.1 — 5.3, 5.5, 6.4 — 6.8), А. А. Петров (предисловие, гл. 1, 2, 7), В. С. Титов (пп. 3.2, 4.1, 4.2, 5.4, 5.7, 5.8), Ю. Г. Якушенков (пп. 3.1, 3.3, 3.4, 5.6, 6.1 — 6.3).
ГЛАВА 1 СТРУКТУРА И ОСОБЕННОСТИ СИСТЕМ ТЕХНИЧЕСКОГО ЗРЕНИЯ РОБОТОВ
1.1. ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ ЗАДАЧИ СИСТЕМ ТЕХНИЧЕСКОГО ЗРЕНИЯ В РОБОТОТЕХНИКЕ
Роботы, снабженные СТЗ, достаточно широко и успешно применяются во многих отраслях промышленности на таких операциях, как контроль и отбраковка различных деталей и изделий по внешнему виду, загрузка обрабатывающих станков деталями с конвейеров или из бункеров, сортировка и ориентированная укладка в кассеты деталей и заготовок, в том числе неупорядоченно движущихся по конвейеру или поступающих в таре навалом, сборка и комплектация узлов, сварка, окраска, упаковка изделий, монтаж электронных схем и других СТЗ используют также для обеспечения условий техники безопасности на роботизированных рабочих местах, организации учета и складирования предметов производства, маршрутизации материалопотоков в гибких производственных системах, управления транспортными мобильными роботами.
Роль адаптивных роботов с техническим зрением и элементами искусственного интеллекта еще более возрастает при расширении процесса роботизации в таких областях, как горнодобывающая промышленность, строительство, сельское и лесное хозяйство, коммунальные службы, быт, где рабочая среда носит сложный, плохо структурированный характер. СТЗ необходимы роботам, предназначенным для исследования космического и подводного пространства, используемым для тушения пожаров и при других стихийных бедствиях. В подобных приложениях СТЗ должна обеспечивать не только данные для непосредственной выработки сигналов обратной связи при управлении движениями робота и передачу сведений об окружающей среде человеку-оператору, но и информацию для формирования роботом модели рабочей среды в целях автоматического планирования действий.
Функциональное назначение СТЗ робота в зависимости от области и конкретных условий его применения довольно многообразно. Наиболее типичными функциями, выполняемыми СТЗ в робототехнике, являются следующие: регистрация наличия объекта в поле зрения датчика внешней (по отношению к роботу) видеоинформации — видеосенсора; подсчет числа объектов, находящихся в поле зрения или прошедших перед видеосенсором;
считывание и расшифровка меток (цветовых или штриховых кодов, буквенно-цифровых символов, этикеток и других маркеров); обнаружение препятствий, мешающих движениям робота; измерения геометрических и физических параметров объектов; контроль изделий на наличие видимых дефектов, полноту комплектации, соответствие эталонам; классификация (распознавание) объектов; определение местоположения и ориентации объектов в рабочей зоне робота; поиск нужных объектов на рабочей сцене; измерение скорости движущихся объектов; слежение за перемещениями и изменениями скорости объектов; визуальное определение изменений во времени наблюдаемых физических и технологических процессов; обеспечение информации для задания и коррекции траекторий рабочего органа робота в адаптивном режиме; навигация и наведение мобильных роботов; визуальный контроль правильности выполнения операций роботом; калибровка геометрических параметров манипулятора, привязка его системы координат к системе координат рабочего пространства; обеспечение требований техники безопасности.
Функциональные задачи СТЗ, характерные для робототехнических приложений, можно условно разделить по уровню их относительной сложности. К элементарным задачам обычно относят: обнаружение наличия объекта; измерение расстояния до объекта, его линейных или угловых перемещений, скорости; измерение геометрических параметров объекта (линейных и угловых размеров, площади и т. п.); определение физических характеристик излучения от объекта (интенсивности, спектрального состава и пр.); подсчет числа объектов и др.
Более сложный круг задач выполняет, например, СТЗ, которая снабжает систему управления манипуляционного робота информацией, необходимой для захватывания неупорядоченных объектов. В число этих задач входят: обзор рабочей сцены (плоской или пространственной) для поиска представляющего интерес объекта — одиночного или одного из нескольких, лежащего изолированно от других или соприкасающегося (перекрывающегося) с ними; определение местоположения и ориентации этого объекта; его классификация (если имеется несколько различных классов объектов). При этом объекты могут различаться не только размерами и формой (силуэтом), но и текстурой, цветом и т. п., покоиться или находиться в движении. Этот пример иллюстрирует тот факт, что относительная сложность функциональных задач СТЗ характеризуется целым рядом признаков, среди которых можно выделить следующие.
Размерность рассматриваемой сцены. Пространственные задачи, требующие анализа трехмерных сцен, как правило, намного сложнее «плоских» задач, в которых достаточно обработки изображения одной двумерной проекции сцены на картинную плоскость. Промежуточное положение занимают квазиплоские задачи («размерности 2,5»), где рассматривается картинная плоскость с добавлением информации о «глубине» (дальности) видимых точек изображения.
Степень изолированности объектов. По этому признаку задачи СТЗ классифицируются так (в порядке возрастания сложности): задачи с одиночным объектом; задачи с несколькими изолированными (т. е. несоприкасающимися) объектами на изображении; задачи с соприкасающимися (но не перекрывающимися) изображениями объектов; задачи о перекрытием одних объектов рабочей сцены другими.
Однородность объектов. Этот признак характеризует сложность задач классификации, стоящих перед СТЗ. Если все объекты, которые могут быть предъявлены СТЗ, идентичны, эта проблема вообще не возникает. При наличии ряда неодинаковых объектов задача их классификации тем сложнее, чем более «похожи» друг на друга их изображения, т. е. чем больше классифицирующих признаков необходимо для однозначного описания отличий каждого объекта от всех остальных.
Стационарность рабочей сцены. Изображения покоящихся объектов обрабатывать и анализировать проще, чем изображения объектов, которые перемещаются относительно видеосенсоров (например, при движении деталей по конвейеру, зрительном очувствлении мобильного робота, работе СТЗ типа «глаз на руке»).
Число элементов изображения. Чем больше размеры поля зрения и чем выше требуемая разрешающая способность СТЗ, тем сложнее задача, поскольку приходится обрабатывать больше элементов получаемого изображения Число градаций яркости. Задачи, в которых достаточно анализировать силуэтные очертания объектов, т. е. работать с двухградационными (бинарными) изображениями, как правило, решаются проще задач, требующих анализа многоградационных Спектральный состав видеосигнала. Наделить робот способностью воспринимать цветные изображения, вообще говоря, сложнее, чем снабдить его монохроматическим зрением.
Кроме того, на сложность тех или иных задач СТЗ существенное влияние оказывают такие факторы, как качество освещения рабочей сцены, его стабильность, уровень оптических и электрических помех, контрастность объектов относительно фона, отражающие свойства их поверхности, и др.
Чем более сложные задачи с учетом всей совокупности описанных критериев способна решать СТЗ, тем выше уровень функциональной гибкости («интеллекта») робота может быть обеспечен с ее помощью.
Для выполнения своего функционального назначения СТЗ робота в общем случае должна обеспечивать: восприятие оптического сигнала и формирование изображения- предварительную обработку изображения в целях ослабления влияния шумов, улучшения контрастности, коррекции искажений, сжатия инфор-
мации ит. д.; сегментацию изображения сцены на составные части — выделение нужных объектов, их фрагментов или характерных особенностей; описание изображений — расчет их геометрических и иных характеристик, вычисление классифицирующих признаков, определение местоположения и ориентации; анализ изображения с распознаванием образов или классификацией объектов и интерпретацией сцен на основе модели проблемной среды; передачу полученных результатов в систему управления робота.
Создание СТЗ робота, отвечающей ее конкретному функциональному назначению, включает следующие этапы: 1) постановку задачи на содержательном уровне и составление технического задания на СТЗ; 2) выбор структурной и функциональной схем СТЗ; 3) математическую формулировку задач функциональных блоков СТЗ; 4) разработку алгоритмов решения функциональных задач; 5) выбор средств реализации алгоритмов и конкретизации технических характеристик аппаратных, аппаратно-программных и программных блоков СТЗ в соответствии с техническим заданием; 6) разработку аппаратного и программного обеспечения СТЗ.
Прежде чем перейти к рассмотрению этих вопросов, остановимся на особенностях работы роботов о техническим зрением.
Техническое зрение роботов (стр. 1 из 8)
С целью классификации методов и подходов, используемых в системах технического зрения, зрение разбито на три основных подкласса: зрение низкого, среднего и высокого уровней. Системы технического зрения низкого уровня предназначены для обработки информации с датчиков очувствления.
Эти системы можно отнести к классу «интеллектуальных» машин, если они обладают следующими признаками (признаками интеллектуального поведения):
1) возможностью выделения существенной информации из множества независимых признаков;
2) способностью к обучению на примерах и обобщению этих знаний с целью их применения в новых ситуациях;
3) возможностью восстановления событий по неполной информации;
4) способностью определять цели и формулировать планы для достижения этих целей.
Создание систем технического зрения с такими свойствами для ограниченных видов рабочего пространства в принципе возможно, но характеристики таких систем далеки от возможностей человеческого зрения. В основе технического зрения лежит аналитическая формализация, направленная на решение конкретных задач. Машины с сенсорными характеристиками, близкими к возможностям человека, по-видимому, появятся еще не скоро. Однако отметим, что копирование природы не является единственным решением этой проблемы. Читателю наверняка известны ранние экспериментальные образцы аэропланов с машущими крыльями и другими особенностями полета птиц. Современное решение задачи о полете в пространстве в корне отличается от решений, подсказанных природой. По скорости и достижимой высоте самолеты намного превосходят возможности птиц.
Системы технического зрения среднего уровня связаны с задачами сегментации, описания и распознавания отдельных объектов. Эти задачи охватывают множество подходов, основанных на аналитических представлениях. Системы технического зрения высокого уровня решают проблемы, рассмотренные выше. Для более ясного понимания проблем технического зрения высокого уровня и его связи с техническим зрением низкого и среднего уровней введем ряд ограничений и упростим решаемую задачу.
2.СЕГМЕНТАЦИЯ
Сегментацией называется процесс подразделения сцены на составляющие части или объекты. Сегментация является одним из основных элементов работы автоматизированной системы технического зрения, так как именно на этой стадии обработки объекты выделяются из сцены для дальнейшего распознавания и анализа. Алгоритмы сегментации, как правило, основываются на двух фундаментальных принципах: разрывности и подобии. В первом случае основной подход основывается на определении контуров, а во втором — на определении порогового уровня и расширении области. Эти понятия применимы как к статическим, так и к динамическим (зависящим от времени) сценам. В последнем случае движение может служить мощным средством для улучшения работы алгоритмов сегментации.
Методы — вычисление градиента, пороговое разделение — определяют разрывы в интенсивности представления образа объекта. В идеальном случае эти методы определяют пикселы, лежащие на границе между объектом и фоном. На практике данный ряд пикселов редко полностью характеризует границу из-за шума, разрывов на границе вследствие неравномерной освещенности и других эффектов, приводящих к размытию изображения. Таким образом, алгоритмы обнаружения контуров сопровождаются процедурами построения границ объектов из соответствующих последовательностей пикселов. Ниже рассмотрено несколько методик, пригодных для этой цели.
Одним из наиболее простых подходов соединения точек контура является анализ характеристик пикселов в небольшой окрестности (например, в окрестности размером 3 X 3 или 5 X 5) каждой точки (х, у) образа, который уже подвергся процедуре обнаружения контура. Все точки, являющиеся подобными (определение критерия подобия дано ниже), соединяются, образуя границу из пикселов, обладающих некоторыми общими свойствами.
При таком анализе для установления подобия пикселов контура необходимо определить:
1 ) величину градиента, требуемого для построения контурного пиксела,
2) направление градиента.
Первая характеристика обозначается величинойG
Таким образом, пиксел контура с координатами (х’, у’) подобен по величине в определенной ранее окрестности (х, у) пикселу с координатами (х, у), если справедливо неравенство
где Т — пороговое значение.
Направление градиента устанавливается по углу вектора градиента, определенного в уравнении
где q—угол (относительно оси х), вдоль которого скорость изменения имеет наибольшее значение. Тогда можно сказать, что угол пиксела контура с координатами х’, у’) в некоторой окрестности (х, у) подобен углу пиксела с координатами х, у) при выполнении следующего неравенства:
где А— пороговое значение угла. Необходимо отметить, что направление контура в точке х, у) в действительности перпендикулярно направлению вектора градиента в этой точке. Однако для сравнения направлений неравенство дает эквивалентные результаты.
Основываясь на этих предположениях, мы соединяем точку в некоторой окрестности (х, у) с пикселом, имеющим координаты (х, у), если удовлетворяются критерии по величине и направлению. Двигаясь от пиксела к пикселу и представляя каждую присоединяемую точку как центр окрестности, процесс повторяется для каждой точки образа. Для установления соответствия между уровнями интенсивности освещения и последовательностями пикселов контура применяется стандартная библиотечная процедура.
Цель состоит в определении размеров прямоугольников, с помощью которых можно построить качественное изображение. Построение таких прямоугольников осуществляется в результате определения строго горизонтальных и вертикальных контуров. Дальнейший п роцесс состоял в соединении сегментов контура, разделенных небольшими промежутками, и в объединении отдельных коротких сегментов.
Рассмотрим метод соединения граничных точек путем определения их расположения на кривой специального вида. Первоначально п редполагая, что на плоскости ху образа дано п точек, тре буется найти подпоследовательности точек, лежащих на прямых линиях. Одно из возможных решений состоит в построении всех линий, проходящих через каждую пару точек, а затем в нахождении всех подпоследовательностей точек, близких к определенным линиям. Задача, связанная с этой процедурой, заключается в нахождении п(п— 1)/2
п 3 сравнений каждой точки со всеми линиями. Этот процесс трудоемок с вычислительной точки зрения за исключением самых простых приложений.
Данную задачу можно решить по-другому, применяя подход, предложенный Хоугом и называемый преобразованием Хоуга . Рассмотрим точку (х i y i ) и общее уравнение прямой линии у: = аx i + bi . Имеется бесконечное число линий, проходящихчерез точку(х i yi ), но все они удовлетворяют уравнению у:= аx i +bi при различных значениях а и b. Однако, если мы запишем это уравнение в виде b = -хiа + yi и рассмотрим плоскость а b (пространство параметров), тогда мы имеем уравнение одной линии для фиксированной пары чисел (х i yi ). Более того, вторая точка (х j , у j ) также имеет в пространстве параметров связанную с ней линию, которая пересекает другую линию, связанную с точкой (хi yi ) в точке (а’, b’), где значения а’ и b’— параметры линии, на которой расположены точки(хi yi )и (хj , у j ) в плоскости ху. Фактически все точки, расположенные на этой линии, в пространстве параметров будут иметь линии пересечения в точке (а’, b’) .
Вычислительная привлекательность преобразования Хоуга заключается в разделении пространства параметров на так называемые собирающие элементы , где (aмакс , амин ) и (bмакс , bмин )—допустимые величины параметров линий. Собирающий элементA (i, j) соответствует площади, связанной с координатами пространства параметров (а i , bj ). Вначале эти эле менты считаются равными нулю. Тогда для каждой точки (xk , у k ) в плоскости образа мы полагаем параметр а равным каждому из допустимых значений на оси а и вычисляем соответствующее b, используя уравнение b = — х k + y k Полученное значение b затем округляется до ближайшего допустимого значения на оси b. Если выбор aр приводит к вычислению b q, мы полагаем А( р, q) == А( р, q) + 1. После завершения этой процедуры значение М в элементеA (i, j) соответствует М точкам в плоскости xy, лежащим на линииy= ai x+b. Точность расположения этих точек на одной прямой зависит от числа разбиений плоскости аb. Отметим, что, если мы разбиваем ось а на К частей, тогда для каждой точки(xk , у k ) мы получаем К значений b, соответствующих К возможным значениям а. Поскольку имеется п точек образа, процесс состоит из пК вычислительных операций. Поэтому приведенная выше процедура линейна относительно п и имеет меньшее число вычислительных операций, чем процедура, описанная выше, если К
Техническое зрение в управлении мобильными роботами
Автоматическое управление движением мобильного робота SRX основывается на использование систем компьютерного зрения. Особенности применения робота требуют высокоточного проезда по местности, которая не всегда может быть открыта для приема сигналов спутниковых навигационных систем. Поэтому, использование дифференциальных СНС, широко распространённых в системах параллельного вождения точного земледелия — невозможно. Лидары, применяемые в автомобилях без водителя, достаточно дороги. Многолучевые лазерные сканеры требуют большой электрической мощности, для своего питания и для питания высокопроизводительных вычислителей обрабатывающих потоки данных от них.
В тоже время, системы компьютерного зрения широко используются в промышленной робототехники. Инженерным сообществом наработан большой опыт создания надежных систем технического зрения для работы в условиях искусственного освещения. Используя существующие достижения, компания «СМП Роботикс» разработала ряд решений пригодных для использования на улице, в условиях нестабильного естественного освещения.
Применение систем компьютерного зрения позволило получить приемлемую стоимость системы управления движением, несмотря на использование шести встроенных компьютеров. По мере увеличения вычислительной мощности микропроцессоров количество встроенных вычислителей будет уменьшаться, стоимость системы управления заметно снизится, а максимальная скорость движения мобильного робота значительно возрастет.
Обнаружение и объезд препятствий
Для решения задач обнаружения и объезда препятствий используется пара камер образующих стереосистему. Сопоставляя идентичные элементы изображений от каждой из камер, алгоритм системы технического зрения синтезирует трехмерное изображение пространства перед камерами. Это позволяет построить карту глубины и рассчитать дальность до препятствий, попавших в поле зрение камер. Дальность, на которой от стереопары можно получить достоверные данные определяется стереобазой и, применительно к роботу SRX1, составляет 4 — 5 метров. Увеличивая стереобазу и разрешение видеокамер системы технического зрения, можно значительно повысить точность и глубину синтезируемой карты диспаратности.
По мере своего продвижения робот выстраивает трехмерную карту окружающего пространства. По ней, собственно, прокладывается путь и планируется движение робота вычислителем автопилота.
Корректировка пути проезда
Основное назначение робота SRX 1 — перемещение по подготовленным территориям, асфальтовым или иным дорожкам с твердым покрытием. Вследствие этого стоит задача – необходимо избегать съезда робота с твердого покрытия дорожки, например на газон, через который проложена дорожка. В ряде случаев, ширина дорожки лишь на 10-20 сантиметров превышает ширину колеи робота, поэтому требования, предъявляемые к точности системы управления движением, достаточно высоки.
Задача высокоточного перемещения по узкой дорожке с покрытием, решается системой технического зрения, источник данных для которой видеокамера, направленная вперед и вниз. Изображение с этой камеры отображает дорогу, находящуюся по курсу движения робота, ее границы и поверхность за пределами асфальта. Используя оригинальный алгоритм сравнения текстур подстилающих поверхностей, вычислитель дорожной камеры корректирует движение робота в тех случаях, когда имеется визуальное отличие в цвете или текстуре предпочтительного пути проезда от остальной поверхности.
Автономная навигация робота по изображению
Для осуществления успешных автоматических проездов требуется решить задачу навигации, определения текущего местоположения робота. Несмотря на наличие в роботе приемника спутниковой навигационной системы, точность определения координат, им обеспечиваемая, не позволяет осуществлять проезд по маршруту с приемлемой точностью. Кроме того, надежность поступления данных от СНС сильно зависит от условия приема, местоположения приемной антенны по отношению к строениям и деревьям.
В описываемом проекте навигация реализуется системой технического зрения по изображению с вперед смотрящей видеокамеры. Алгоритм обработки запоминает изображение при тестовом проезде, выполняемом в режиме ручного управления, а в дальнейшем, при автоматическом движении, сопоставляет сохранённые изображения и увиденные в момент перемещения, находя расхождения — корректирует путь движения, с целью максимального приближения текущей траектории движения к ране пройденной. Реализация этого решения позволяет получать точность определения текущего местоположения с ошибкой отклонением от истинного, менее одного метра.
Подробнее об автономной навигации мобильных роботов на основе компьютерного зрения …
Инерциальная навигация и БИНС в системе управления роботом
В те моменты движения робота, когда ориентиров на изображении навигационной системы, по каким либо причинам не достаточно, робот продолжает движение, обрабатывая данные полученные от встроенного БИНС (Блока Инерциальной Навигационной Системы). В нем используются относительно дешевые микромеханические (MEMS), гироскопы и инклинометры. Дрейф микромеханических приборов используемых в этом узле фильтруется, и это позволяет достаточно точно восстановить траекторию движения робота на участке пути в несколько десятков метров, до момента поступления достоверных данных от визуальной навигационной системы технического зрения.
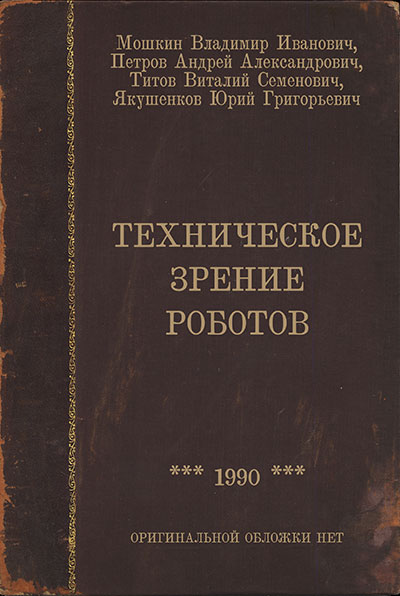
Реализация алгоритмов машинного зрения
Алгоритмы обработки видеоданных, систем технического зрения и управления движением, реализованы в программном обеспечении бортовых вычислителей. В роботе модели SRX 1 используется шесть вычислителей на базе процессоров архитектуры Cortex A9. Бортовые вычислители связаны между собой высокоскоростной локальной сетью. Все они работают под управлением операционной системы Linux. Управление взаимодействием встроенных компьютеров и формирование команд контроллерам приводов, осуществляется мультикомпьютерным программным движком RedCore.
Подробнее о программном обеспечение системы управления движением мобильных роботов ….
Программное обеспечение системы управления движением мобильного робота
Программный движок RedCore разработан для управления движением мобильных роботов серии SRX. Встроенное ПО обрабатывает данные от систем компьютерного зрения, блока инерциальных датчиков, СНС, механического одометра и формирует управляющие команды для контроллеров механических приводов робота.
Интерфейс оператора реализован в виде программного приложения для планшетного компьютера под управлением ОС Андроид. Приложение обеспечивает отображение текущего местоположение робота, видео с его камер, состояние систем управления и заряда батарей, позволяет задавать маршрут движения.
Для решения нетиповых задач, связанных с эксплуатацией робота в особых условиях, разработано и поддерживается API, позволяющее программировать сложные маршруты движения и создавать новые программные модули для их безошибочного прохождения. Подробнее.
Мультиагентное программное обеспечение с элементами искусственного интеллекта
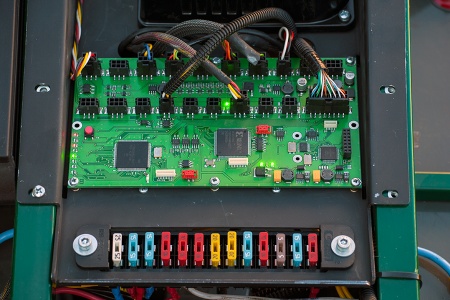
Главный экран программы «Robot Vision»
Для целей постановки задачи мобильному роботу и контроля хода её выполнения, разработан программный пакет «Robot Vision». ПО представляет собой приложение для планшетного компьютера под управлением ОС Андроид. Наряду с простыми и необходимыми задачами, связанными с выбором маршрута перемещения, отображением текущего положения мобильного робота и состоянием его систем, программное обеспечение позволяет решать задачи группового управления роботами на обширных территориях с целью оптимального решения задач, с неполной исходной информацией, используя эвристические алгоритмы. Фактически, — превращая группу мобильных роботов в сверхорганизм с элементами искусственного интеллекта.
Под каждую практическую инсталляцию, связанную с групповой эксплуатацией роботов, разрабатывается индивидуальный программный пакет, который обеспечивает постановку и распределение задач во многоагентной системе роботов. В зависимости от общей задачи, решаемой роботизированной системой, выбирается наиболее удачная стратегия и в течении всего времени эксплуатации она совершенствуется, как в автоматическом, так и ручном режиме. При этом эффективность применения группировки роботов с течением времени значительно повышается, вследствие накопления наиболее полных и как следствие, легко формализуемых знаниях об условиях успешного решения поставленных задач. Подробнее.
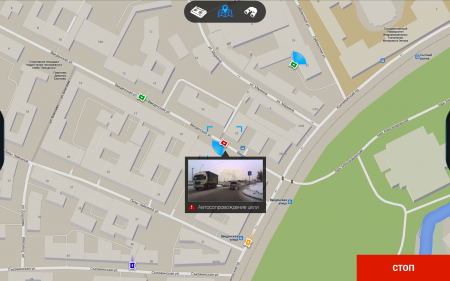
Беспроводная зарядка аккумуляторов колёсного робота
Беспроводная зарядка аккумуляторов колесного робота
В качестве источника энергии движения наземных беспилотных транспортных средств, поставляемых компанией, используются аккумуляторы различных систем. Для некоторых энергозатратных применений используется встроенный бензиновый генератор, однако,в подавляющем большинстве случаев зарядка аккумуляторных батарей электромобиля осуществляется от стационарного зарядного устройства. В этих условиях для достижения максимальной автономности устройства наиболее целесообразно использовать беспроводные способы передачи энергии на борт робота.
Разработана система беспроводной зарядки с использованием квазирезонансной передачи электрической энергии c выходной мощностью 0.7 кВт. Две антенны располагаются с зазором в несколько сантиметров друг над другом. Первая — на поверхности дороги или сервисной зоны, вторая — под днищем робота. Система автоматического управления движением робота обеспечивает наезд и совмещение антенн друг над другом, а для увеличения КПД передачи энергии используется механическое сближение антенн.
Система беспроводной зарядки аккумуляторных батарей электромобиля, которым являются все разрабатываемые компанией колесные шасси, спроектирована с учётом требований по электромагнитной совместимости и уровень её излучения не превышает норм ГОСТ Р 51317.6.4-99 на допустимую эмиссию помех.
Электронные силовые преобразователи, установленные на борту робота, обеспечивают выходное напряжение 12/24В для зарядки аккумуляторных батарей и их подогрева. Питание электронных преобразователей стационарной антенны осуществляется от сети 220В.
Особенность применения данного инженерного решения заключается в том, что позволяет подзаряжать аккумуляторные батареи в нескольких местах по пути движения, и тем самым увеличить пробег и избежать их полного истощения. Причём, во всех точках подзарядки оператор не требуется, всё производится автоматически.
Зрение роботов в системах технического зрения
§ 2.4. Системы технического зрения роботов
В предыдущем параграфе была дана общая постановка задачи адаптации в робототехнике и описаны датчики очувствления роботов. В этом параграфе рассматривается еще один вид очувствления — техническое зрение, дающее большую информацию о внешней среде робота.
Системы технического зрения роботов могут быть телевизионные, фотоматричные, построенные на приборах с зарядовой связью (ПЗС), лазерные и другие. Телевизионные, фотоматричные и ПЗС-системы технического зрения дают возможность либо бинарного (черно-белого) определения очертаний предметов, т. е. в двух градациях, либо многоградационного, когда они могут различать несколько градаций яркости, т. е. давать картину со множеством полутонов. Требование такой повышенной точности идентификации изображения зависит от потребностей технологического процесса. Этим определяется и сложность микропроцессорной обработки информации в таких системах.
Искусственное зрение используется в робототехнических системах для разных целей: контроль качества выполнения технологической операции (в частности, контроль процесса сборки узлов изделий), обнаружение наличия предмета, распознавание фактически складывающейся обстановки, определение местоположения и ориентации предметов, идентификация и различение деталей в темпе хода технологического процесса. Системы искусственного зрения помогают роботу взять деталь с движущегося конвейера, произвести сборку изделия, окраску, сварку и другие операции.
Системы технического зрения для обработки видеоинформации снабжаются необходимыми алгоритмами и программным обеспечением. Они могут иметь наборы прикладных программ реального времени для различных технологических задач с микропроцессорной обработкой информации. Тогда они чисто программным путем быстро переналаживаются для обслуживания тех или иных технологических операций. Следовательно, совместно с роботами, для очувствления которых системы технического зрения служат, и с другим оборудованием они представляют единый многофункциональный роботизированный технологический комплекс, способный автоматически работать в различных ситуациях как при смене вида операций, так и в не вполне определенной или меняющейся обстановке.
Фотоматричная система технического зрения реализуется наиболее простыми техническими средствами. Чувствительным элементом (датчиком изображения) служит небольшая матрица фотодиодных элементов 16×16 или 32×32. Разрешающая способность таких систем ограничена количеством элементов дискретизации. Однако такого объема информации бывает достаточно для многих технологических задач. С помощью несложной цифровой обработки информации можно извлекать из полученного изображения для ввода в управляющую микроЭВМ робота сигналы о тех или иных признаках предмета и его расположении, используя два уровня (черное — белое) или, если нужно, несколько градаций яркости.
К преимуществам фотоматричной системы относятся достаточная прочность и надежность, малые вес и размеры приемной камеры (например, цилиндр диаметром 3 см и длиной 8 см). Поэтому такую систему удобно устанавливать прямо на схвате робота (рис. 2.37), и робот может «рассматривать» предмет, с которым он манипулирует. Таким образом, робот получает искусственный «глаз» на конце своей «руки», которая, перемещаясь, может заглядывать этим «глазом» в любые места рабочего пространства, в том числе и за перегородки и другие препятствия.
Рис. 2.37. Фотоматричная система технического зрения на схвате промышленного робота
Преимуществом фотоматричной системы технического зрения является также малое энергопотребление и высокая фоточувствительность. Система сохраняет работоспособность без перенастройки в широком диапазоне колебаний освещенности. Важным фактором для работы в темпе хода технологического процесса является простота, а значит, и быстрота обработки информации по простым признакам изображения предметов. Большое быстродействие системы на фотодиодных матрицах объясняется параллельным способом считывания информации с элементов матрицы.
В качестве преобразователей свет — сигнал в таких системах широко применяются кремниевые фотодиоды. Оптические сигналы преобразуются в электрические, производится их усиление, кратковременное хранение и считывание. Каждая ячейка матрицы содержит фоточувствительную область (фотодиод) и три транзистора, выполняющие функции усиления и управления ячейкой.
При считывании с накоплением энергия излучения, падающая на фоточувствительную область, накапливается в течение определенного времени, а затем выполняется считывание. Этим существенно повышается чувствительность матрицы и используется возможность управлять выходным сигналом путем изменения времени накопления. Цикл преобразований в целом включает стирание, запись, считывание.
Функциональная схема камеры на основе фотодиодных матриц имеет вид, показанный на рис. 2.38. Видеосигналы с ФДМ идут параллельно на аналого-цифровой преобразователь и затем в оперативное запоминающее устройство для согласования порядка и скорости вывода данных в процессор обработки информации.
Рис. 2.38. Функциональная схема фотоматричной системы (ЗГ — задающий генератор, определяющий частоту следования управляющих импульсов; Ф — формирователь импульсов стирания, подготавливающий к работе одновременно все ячейки матрицы в начале каждого цикла; ФР — формирователь-распределитель импульсов адреса по строкам матрицы в соответствии с заданным порядком их считывания; ФДМ — фотодиодная матрица; АЦП — аналого-цифровой преобразователь; ОЗУ — оперативное запоминающее устройство)
Важно, что фотодиодные матрицы не обладают инерционностью при считывании. Их дискретная структура позволяет получать информацию о движущихся предметах без искажений.
Телевизионные системы технического зрения роботов дают более богатую картину изображения обстановки. Они строятся на базе малогабаритных производственных телекамер обычно с полем 256×256 точек. Разумеется, для применения в робототехнике не требуется знания всех подробностей обстановки, которую дает телекамера. Поэтому при цифровой обработке полученного изображения следует выделить необходимый минимум сведений, отвечающий заложенным в память и в программу ЭВМ робота признакам нужного объекта для последующих действий робота или просто для выполнения контрольных функций по ходу процесса (рис. 2.39).
Рис. 2.39. Робот с контрольной телевизионной системой технического зрения
С этой целью строится специализированный вычислитель с микропроцессорной обработкой информации по заданному алгоритму, если это относится к достаточно узкому классу задач с ограниченным разнообразием программ действия системы. При более универсальном применении системы технического зрения с широкими возможностями программирования и переналадки программного обеспечения робототехнической системы в целом, снабженной искусственным зрением, используется микроЭВМ. При этом между телекамерой и ЭВМ вводится устройство сопряжения для предварительной обработки изображения с целью получения сигналов, удобных для ввода в микроЭВМ (рис. 2.40 и 2.41).
Рис. 2.40. Блок-схема телевизионной системы технического зрения
В качестве преобразователя свет — сигнал в телевизионных системах технического зрения используются передающие трубки различных типов. Наиболее распространено применение видиконов с фотоэлектрическим преобразованием на основе внутреннего фотоэффекта. Процесс преобразования свет — сигнал здесь основан на накоплении заряда на конденсаторах. В процессе развертки электронным лучом освещенных и неосвещенных участков фотомишени видикона образуется сигнал изображения. Видиконы имеют высокую чувствительность, хорошую разрешающую способность и широкий спектральный диапазон. На рис. 2.42 представлена функциональная схема телекамеры на базе видикона. Обычно телекамера соединяется с микроЭВМ через электронное устройство сопряжения с применением стандартного интерфейса. Устройство сопряжения обеспечивает пространственную дискретизацию видеосигнала, квантование его по яркости, преобразование в параллельный 16-разрядный код, запоминание видеосигнала и связь с интерфейсом ЭВМ.
Рис. 2.41. Реализация телевизионной системы технического зрения
В телевизионных камерах общего назначения используются, как правило, видиконы с магнитным отклонением считывающего луча. Они применяются и в системах технического зрения. Но для промышленных роботов в системах технического зрения более перспективны видиконы с электростатическим отклонением считывающего луча. Такие системы позволят увеличить скорость развертки (что для роботов очень важно) и реализовать при необходимости нестандартные виды развертки (радиальную, спиральную). В них более простыми средствами достигаются высокая линейность отклонения луча и другие желаемые свойства.
Рис. 2.42. Функциональная схема телекамеры на базе видикона
Одним из основных требований, предъявляемых к системам технического зрения, является выполнение их функций в реальном масштабе времени, соответствующем ходу обслуживаемого ими рабочего процесса. А ввиду большого объема информации в телевизионном изображении и недостаточно высокого быстродействия из-за последовательного способа передачи видеосигнала это требование должно обеспечиваться существенным сокращением обрабатываемой информации. Последнее достигается выбором достаточно простых признаков идентификации предметов, построением быстродействующих алгоритмов с распараллеливанием вычислений и операций, применением многопроцессорных сетей, аппаратными средствами сжатия информации на входе, а также другими способами, связанными с целенаправленным управлением процессом ввода изображения. Сокращение объема обрабатываемой информации важно также и для уменьшения объема требуемой памяти.
Чаще всего на производстве для обследования плоских изображений можно обойтись применением системы технического зрения. Во всех случаях, где это возможно, следует ограничиваться использованием бинарных изображений (черное — белое) ввиду простоты процедуры обработки видеоинформации (большое значение при этом имеет контраст между предметом и фоном). К многоградационным системам следует прибегать при действительной необходимости получения значительно большей информации об объекте с полу-тоновым рисунком. В ряде случаев такое многоградационное изображение позволяет на плоской картине судить о третьем измерении деталей объекта (углубления, выступы и т. п.) за счет полутонов, получающихся при освещении объекта.
Но для тех случаев, когда технологические задачи нуждаются в более достоверной информации о трехмерных объектах, существуют другие методы построения систем технического зрения, которые в меньшей степени подвержены влиянию изменения внешнего освещения.
Программное обеспечение в системах технического зрения зависит от алгоритмов обработки информации, т. е. от способов идентификации предметов и выбранных признаков для этого, а эти факторы существенно влияют на обеспечение требования работы системы в реальном времени.
На точность работы системы технического зрения влияют, кроме дискретизации изображения, и геометрические искажения камеры (они более заметны по периферии поля зрения). Поэтому желательно, чтобы оптическая ось камеры была перпендикулярна к плоскости рабочего пространства. Влияют на точность также калибровка, фокусировка, выбор порога при бинарной системе. Погрешности вносят и алгоритмы обработки видеоинформации.
МикроЭВМ в системе технического зрения выполняет ряд функций. Она организует процесс совместной работы блоков системы по заданным алгоритмам, обрабатывает массивы цифровых данных о состоянии рабочего пространства с целью идентификации предмета, вычисляет его координаты, ориентацию и прочие признаки, выдает результаты в систему управления роботом, контролирует остальные порученные ей процессы и устройства.
Изображение формируется в памяти ЭВМ в виде матриц отсчетов градаций яркости объекта. Производится предварительная обработка (сглаживание, повышение контрастности, фильтрация). Анализ изображения в ЭВМ состоит, например, в выделении контуров на изображении. Затем в ЭВМ выполняется интерпретация изображения, т. е. сравнение результата анализа по заданным признакам с геометрическими характеристиками объекта, хранящимися в памяти ЭВМ. Таким образом автоматически решается задача распознавания в адаптивном роботе.
Положение объекта определяется по координатам его силуэта, полученного в ЭВМ путем выделения контуров изображения. Эталонные признаки для идентификации объекта могут быть введены в память ЭВМ, например, в режиме обучения. Иногда применяются более простые процедуры опознавания объекта — непосредственно по контрастным меткам на изделии.
Существует еще так называемый прожекторный метод, когда предметы различаются по цвету. Предмет освещается, а отраженный световой луч падает на чувствительную поверхность датчика цвета, снабженного тремя цветовыми фильтрами (красным, синим, зеленым). Образуются три сигнала в виде цифровой информации, обрабатываемой в микропроцессорном устройстве. Производится сравнение с соответствующими данными о цветах объекта, заложенными в память ЭВМ. Такая система технического зрения может быть применена не только для распознавания, но также и для автоматического контроля результатов окраски изделий.
Рис. 2.43. Блок-схема робота, различающего цвета предметов (1 — телекамера; 2 — устройство управления цветными фильтрами; 3 — передача видеосигнала; 4 — проектор луча света; 5 — управление лучом света; 6 — ход луча света; 7 — аналого-цифровой преобразователь; 8 — блок определения цвета объекта; 9 — блок обнаружения ребра предмета; 10 — блок измерения расстояния; 11 — ЭВМ распознавания предмета и выбора значений параметров управления; 12 — сигнал, формируемый ЭВМ; 13 — блок управления манипулятором робота; 14 — подпрограмма управления; 15 — манипулятор; 16 — тактильная система информации)
На рис. 2.43 изображена блок-схема робота, различающего цвета предметов. Заложенные в робот подпрограммы обеспечивают выполнение различных вариантов элементарных движений. Адаптивная система программного управления роботом по результатам распознавания составляет рабочую программу для выполнения определенного технологического задания из набора элементарных подпрограмм в различных комбинациях.
Как мы видели, системы технического зрения в большинстве случаев сопрягаются с ЭВМ для обработки видеоинформации при передаче сигналов в систему управления роботом. Такая система обладает универсальными свойствами как многофункциональное устройство для адаптивных роботов различного назначения.
Однако для ряда специфических функций система технического зрения не обязательно должна в своем составе иметь ЭВМ. Нередко для выполнения частных робототехнических задач (по идентификации деталей, обнаружению дефектов и т. п.) достаточно бывает использования модульных электронных плат. Различные их комбинации позволяют выполнять необходимые функции для систем технического зрения без ЭВМ и вводить требуемые сигналы в систему управления адаптивным роботом.
Система технического зрения на базе матрицы ПЗС (приборов с зарядовой связью) имеет матричную структуру чувствительного поля, как и фотодиодная система. Но, в отличие от последней, матрица ПЗС обладает большей плотностью расположения элементов. Поэтому, сохраняя преимущества дискретизации изображения (как в фотоматрице), система с матрицей ПЗС имеет большую информативность, свойственную телевизионной системе. Видеосигнал матриц ПЗС достаточно легко подгоняется под телевизионный стандарт. Системы на основе ПЗС-камер имеют большее быстродействие по сравнению с телевизионными камерами и обладают меньшими габаритами.
Матрица ПЗС представляет собой компактный полупроводник — кремниевую пластинку, на поверхность которой напылена, как тончайшая сеть, система электродов и нанесено просветляющее покрытие для лучшего поглощения фотонов света. Основным элементом матрицы ПЗС является емкость, образованная электродами, которые расположены в тонком слое диэлектрика, покрывающем поверхность полупроводишь. Некоторым недостатком матрицы ПЗС является то, что при ее использовании не допускается слишком сильное освещение, которое вызывает переполнение зарядов, приводящее к плохим результатам приема изображения.
Преимущества системы технического зрения на базе матрицы ПЗС по сравнению с системой на видиконах с точки зрения промышленной робототехники заключаются (кроме малости весов и габаритов) в отсутствии инерционности, низком уровне выходных шумов, высокой линейности фотоэлектрического преобразования, низком напряжении и малой потребляемой мощности, высокой устойчивости к механическим (удары, вибрации, ускорения), акустическим и электромагнитным воздействиям, более высокой надежности и долговечности в эксплуатации. Совокупность всех этих свойств определяет перспективность применения матриц ПЗС для систем технического зрения адаптивных промышленных роботов.
Рис. 2.44. Схема приемной камеры на базе матрицы ПЗС (СГ — сиихрогенератор; ФФНХ — формирователь фазных напряжений для секций хранения; ФФНН — то же для секций накопления; ФФНР — то же для выходного регистра; СН — секции накопления; СХ — секции хранения; ВР — выходной регистр; ВУ — выходное устройство; У — усилитель)
Функциональная схема приемной камеры на базе матрицы ПЗС показана на рис. 2.44. В выходном устройстве заряды преобразуются в потенциалы, соответствующие последовательности видеоимпульсов, которые затем усиливаются.
Отмеченные выше преимущества систем на базе матрицы ПЗС позволяют проще сделать установку нескольких камер и, таким образом, легче осуществлять одновременное получение изображений с различных мест и в сочетании со структурированным освещением получать информацию о трехмерных объектах. Это, естественно, ускоряет работу такой системы технического зрения. Кроме того, одну из камер можно установить непосредственно в кисти манипулятора робота. Перспективно здесь применение систем волоконной оптики для передачи световой информации с ПЗС-камеры, установленной в кисти манипулятора.
Заметим, что для анализа трехмерного изображения в системах технического зрения перспективным является применение голографических методов, позволяющих проводить непосредственный анализ трехмерной сцены.
Системы технического зрения на базе матриц ПЗС весьма целесообразно использовать при необходимости восприятия информации от движущихся объектов, так как сканирование в них осуществляется в одном направлении. Картина воспроизводится практически без искажений и с большей чувствительностью, чем в системах с телевизионными камерами на видиконах.
Для работы с мелкими объектами, например при автоматизации сборки транзисторов и микросхем, отбраковки, установки, крепления кристаллов, распайки приводов, применяются телевизионные камеры (как ПЗС, так и видиконы) в сочетании с микроскопом. МикроЭВМ, кроме описанных ранее функций обработки изображений и формирования сигналов в систему управления сборочным роботом, управляет еще положением и действиями телекамер.
Рис. 2.45. Схема сканирующего лазерного дальномера (1 — направление луча на зеркало; 2 — нормаль к сканирующему зеркалу; 3 — направление измерения дальности)
Применяются в робототехнике также обзорно-поисковые системы технического зрения с использованием лазерного сканирующего дальномера. Пример схемы лазерного дальномера показан на рис. 2.45. Сканирующие дальномеры предоставляют движущемуся адаптивному роботу информацию о неизвестной заранее обстановке с препятствиями, которые надо обходить, двигаясь к заданной цели (цель может быть невидима и задана своими координатами).
Для данного робота основным является движение вперед с огибанием препятствий. Но предусматривается также возможность специальных маневров — развороты и задний ход. Все это определяет и планирует ЭВМ в зависимости от текущих результатов информации об обстановке, получаемой из системы технического зрения с лазерным сканирующим дальномером. Система в целом нуждается в довольно сложном алгоритмическом и программном обеспечении.
Специальные системы технического зрения для особых условий внешней среды могут строиться на других принципах, нежели описанные выше. Для таких целей используются радиационные, тепловые и радиоволновые системы технического зрения. Такие системы применяются в случаях, когда надо получать информацию о состоянии внутренней структуры металла, бетона, дерева, а также для некоторых агрессивных условий.
Средства радиационной интроскопии могут использоваться в адаптивных роботах, например, для сборки узлов при необходимости выявления невидимых неправильных сопряжений и наличия внутренних изъянов в деталях. В этом случае происходит просвечивание объекта проникающей ионизирующей радиацией, например рентгеновской, преобразование радиационного изображения в светотеневое или электронное и передача его с помощью оптического или телевизионного канала.
Перспективным является применение для специальных адаптивных роботов радиационного компьютерного томографа. Принцип томографии заключается во внутреннем послойном сканировании объекта коллимированным рентгеновским пучком, измерении мощности излучения за объектом детекторами с линейной характеристикой и построении полутонового изображения слоев (разрезов) данного объекта по вычисленным в ЭВМ значениям плотности вещества в элементарных ячейках слоя. Координаты каждого элемента определяются также при помощи ЭВМ и могут быть использованы в системе управления действиями адаптивного робота. В томографии применяются и другие физические принципы: ядерно-магниторезонансный, электрический, акустический, тепловизионный.
Системы технического зрения тепловые (в инфракрасном диапазоне волн) применяются для визуализации тепловых полей нагретых тел. В них используется явление эмиссии электромагнитного излучения нагретыми телами. С помощью сканирующих или матричных фотоэлектронных преобразователей рельефа интенсивности излучения на поверхности объекта это излучение преобразуется в эквивалентное распределение электрических сигналов. В результате на экране получается изображение теплового поля объекта разной яркости.
Тепловые системы технического зрения включают оптическую систему для фокусировки инфракрасных лучей, фотопреобразователь, систему развертки и оконечные устройства обработки информации, откуда сигналы подаются в систему управления адаптивным роботом. Для передачи теплового изображения из зоны контроля к системе развертки применяется волоконная оптика.
Радиоволновые системы технического зрения основаны на взаимодействии электромагнитного поля с объектом и преобразовании этого поля в двумерное изображение. Таким методом можно измерять геометрические параметры объекта, расстояние до него, характеристики его движения (скорость, поворот, вибрации) и физические характеристики.
Акустические системы технического зрения используют свойство ультразвуковых волн отражаться отнеоднородностей в жидких, газообразных и твердых средах. При этом производится визуализация акустического поля. Здесь особое значение приобретают алгоритмы фильтрации и улучшения качества изображения ввиду трудностей непосредственного получения хорошего процесса визуализации акустической информации.
В заключение отметим, что в новых образцах адаптивных промышленных роботов появились уже комбинированные средства очувствления. Например, сочетание системы технического зрения с датчиками тактильного или силомоментного очувствления и др., как это имеет место и у человека в процессе его трудовой деятельности.
- http://sheba.spb.ru/delo/tehzren-rob-1990.htm
- http://mirznanii.com/a/320591/tekhnicheskoe-zrenie-robotov
- http://www.smprobotics.ru/technologies/
- http://roboticslib.ru/books/item/f00/s00/z0000033/st010.shtml