Цена:
Авторы работы:
ГРИШИН ВЛАДИМИР АЛЕКСАНДРОВИЧ
Научный журнал:
Год выхода:
ЖУРНАЛ В ЖУРНАЛЕ
Автоматизация: СОСТОЯНИЕ, ПРОБЛЕМЫ, ПЕРСПЕКТИВЫ
Главный редактор — д-р техн. наук, проф. В. Ю. Кнеллер
СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ В РЕШЕНИИ ЗАДАЧ УПРАВЛЕНИЯ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ1
Системы технического зрения (СТЗ) в настоящее время находят все более широкое применение в системах управления полетом беспилотных летательных аппаратов (БПЛА). СТЗ имеют очень высокую информативность и способны измерять большое количество параметров движения и внешней среды. В статье показана степень готовности имеющихся технологий обработки изображений и распознавания образов для выполнения основных задач по управлению БПЛА, в том числе и наиболее сложной задачи — автоматической посадки БПЛА. Ключевые слова: системы технического зрения, беспилотные летательные аппараты, навигация, обнаружение, наведениеугловая стабилизация, посадка.
В настоящее время наблюдается все более широкое использование СТЗ для решения задач управления движением. С одной стороны, это обусловлено постоянным ростом вычислительной мощности процессоров, с другой — постоянным совершенствованием алгоритмов, используемых в СТЗ.
Несомненным достоинством СТЗ в сравнении с классическими радиотехническими системами является возможность измерения вектора параметров существенно большей размерности благодаря высокому разрешению и очень высокой информативности используемых телевизионных датчиков. СТЗ способны измерять параметры относительных перемещений БПЛА, профиль визируемой поверхности, координаты относительно заданных ориентиров, направление на заданные объекты. Кроме того, СТЗ обладают существенно меньшими габаритами, массой и потребляемой мощностью в сравнении с радиотехническими
1 Работа выполнена при поддержке РФФИ\ грант 06-08-01497-а.
(радиолокационными) системами. Нельзя обойти вниманием также и тот факт, что СТЗ несравненно более устойчивы к воздействию различных средств подавления.
Наиболее ярким примером уязвимости радиотехнических систем является радионавигационные системы, такие как GPS, TJIOHAC, Galileo и др. Средства радиоэлектронной борьбы легки, дешевы, малогабаритны и обладают большим радиусом подавления. Парадокс ситуации заключается в том, что системы, разрабатывавшиеся как военные, обладают очень малой устойчивостью к противодействию. События в Ираке в 2003 г. ярко это продемонстрировали.
Большая информативность СТЗ, а главное, их автономность создают предпосылки для реализации систем управления, которые способны адекватно реагировать на внешние события, повышая тем самым безопасность полета и вероятность успешного выполнения миссии. Возможность оперативно и гибко менять сценарий в зависимости от изменения внешних условий является предпосылкой для использования в управлении БПЛА методов искусственного интеллекта. Подавляющее большинство биологических систем, освоив-
ших полет, оснащено эффективными зрительными системами.
Отсутствие привяжи к инфраструктуре и радиотехническим системам обеспечения посадки существенно повышает безопасность полета, так как имеется возможность выполнения автоматической посадки на неподготовленную площадку.
В рамках журнальной статьи не представляется возможным сколь-нибудь полно представить состояние дел в такой бурно развивающейся области знаний, как использование СТЗ в решении задач управления полетом. Поэтому автор не ставил себе задачу перечислить все известные ему работы по данной тематике. Кроме того, на формирование списка источников оказали влияние личные пристрастия и научные интересы автора.
Цель данной статьи — дать представление об уровне развития данной области знаний и выявить имеющиеся тенденции развития.
Рассмотрим возможности, которые предоставляют СТЗ, разрабатываемые в настоящее время, а именно, возможности решения навигационных задач с помощью СТЗ.
Вообще, определение своего положения возможно с помощью поиска заданных ориентиров, местонахождение которых известно с высокой точностью [1, 2]. Ориентиры должны отвечать двум важным требованиям. Во-первых, это легкость и надежность распознавания. Ориентиры должны устойчиво распознаваться при различных условиях освещения и наблюдения, например, при различном положении Солнца над горизонтом, при различных ракурсах наблюдения ориентира, а также при неблагоприятных условиях наблюдения. К таким условиям относится наличие дымки, тумана в воздухе, осадков, низкого уровня освещенности.
Задачи распознавания объектов по их изображениям составляют значительную часть работ по расшифровке спутниковых и аэрофотоснимков. В связи с тем, что объем изображений, получаемых со спутников, растет год от года, активность работ в области задач автоматического или полуавтоматического распознавания объектов на спутниковых снимках также возрастает. Особенно активизировался этот процесс после 1999 г., когда потребители стали получать изображение от коммерческих спутников высокого разрешения IКОЫОБ и ОшскЫгс!. Такие изображения по своему разрешению сопоставимы с аэрофотоснимками. Число публикаций по данной тематике весьма велико. В качестве примера можно привести работы [3, 4]. На снимках хорошо выделяются лесные массивы, поля, реки, озера, линейные объекты, такие, как шоссейные и железные дороги, береговые линии. Выделяются районы сельской и городской ‘.застройки, улицы, отдельные здания и
сооружения. В качестве признаков используются текстурные признаки, спектральные (цвет), а также структурные, связанные с наблюдаемыми границами объектов. Для зданий используются признаки, выделяющие крыши зданий и сооружений.
В публикации [5] представлена система распознавания, предназначенная для работы с изображениями, получаемыми с камеры, установленной на борту БПЛА. Эта система производит выделение статичных и подвижных объектов, а также различных событий на наблюдаемой с БПЛА сцене.
Выбор в качестве ориентиров таких объектов, которые надежно распознаются бортовой СТЗ в автоматическом режиме, позволяет решать задачи автоматической навигации БПЛА. Указанные в работах [3—5] системы распознавания могут быть реализованы на бортовых процессорах достаточной мощности при некотором упрощении задач, что вполне реально для ограниченного набора ориентиров, назначенных для выполнения навигационных задач.
Вторым требованием, предъявляемым к ориентирам, является их устойчивость к маскированию и имитации. По этой причине при формировании базы данных, хранящей информацию об ориентирах, необходимо участие человека-экспер-та. По имеющимся изображениям местности автоматически может быть сформирован набор ориентиров, пригодных для навигации. Однако окончательный отбор ориентиров должен делать эксперт с учетом того, насколько легко можно замаскировать или имитировать данный ориентир. Существенным отличием изображений, получаемых с аппаратов, осуществляющих полет в атмосфере, является то, что изображения, получаемые с их бортовых телевизионных камер, имеют существенно большие искажения, обусловленные рельефом поверхности, нежели изображения, полученные со спутников. Поэтому эталонные изображения, используемые в качестве ориентиров, должны либо содержать информацию о трехмерной форме объектов, используемых в качестве ориентиров, либо иметь несколько эталонов (описаний изображений) для набора различных дальностей и ракурсов визирования. Число этих эталонов определяется характером разбиения области возможных условий визирования на подобласти, внутри которых топологическая структура изображений остается неизменной. Очевидно, что эксперт может выбрать в качестве ориентиров такие объекты, которые имеют наиболее простое описание и обеспечивают наиболее надежное распознавание. При этом для каждой точки, в которой может находиться БПЛА, должен быть определен (задан) набор ориентиров, которые позволяют определить его положение с заданной точностью. Число ориентиров должно быть достаточным для определения положения БПЛА с заданной вероятностью с учетом допустимых мете-
оусловий. Имеется ввиду, что часть ориентиров может быть закрыта облачностью или дымкой либо заслонена какими-то элементами рельефа или другими объектами. Необходимое число ориентиров и плотность их расположения существенно зависит от точности инерциальной навигационной системы, имеющейся на борту БПЛА.
Хранение на борту видовой информации, которую БПЛА фиксирует в процессе полета (если имеется информация от GPS), позволяет переводить СТЗ в режим картографирования и использовать для накопления дополнительной навигационной информации, формируемой либо непосредственно на борту БПЛА, либо после посадки и передачи накопленной видовой информации в пункт обработки.
Значительное внимание, которое здесь уделено спутниковым снимкам, обусловлено тем, что в настоящее время накоплен колоссальный объем видовой информации о поверхности Земли. Имеется также большой рынок спутниковых изображений высокого разрешения (единицы метров). Приблизительно треть мирового объема продаж космических снимков приходится на снимки с разрешением не хуже 3 м. Использование этих изображений позволяет подготавливать хорошие цифровые карты местности, пригодные для оптической навигации высокой точности.
Необходимо отметить, что распознавание заданных объектов (ориентиров), которые были специально отобраны, подготовлены и занесены в цифровые карты местности, происходит существенно надежнее и быстрее, чем распознавание объектов (автоматическая дешифровка) спутниковых и аэрофотоснимков, которое реализовано сейчас.
Предельно упрощенной реализацией таких систем оптической навигации может считаться система навигации DSMAC (Digital Scene Matching Area Correlation), используемая на крылатых ракетах Tomahawk, а также система аналогичного назначения, устанавливаемая на крылатых ракетах Х-555.
Указанные принципы навигации по заданным изображениям уже отрабатываются на беспилотных летательных аппаратах. Например, в работах [6, 7] описываются системы, пригодные для обнаружения и инспекции протяженных объектов, таких как дороги, каналы, мосты, нефтяные трубопро
Для дальнейшего прочтения статьи необходимо приобрести полный текст. Статьи высылаются в формате PDF на указанную при оплате почту. Время доставки составляет менее 10 минут. Стоимость одной статьи — 150 рублей.
Пoхожие научные работы по теме «Энергетика»
ГРИШИН А.А., ИВАНОВА И.А., МОРОЗОВА Т.Ю., НИКОНОВ В.В. — 2015 г.
Эволюция систем управления беспилотных летательных аппаратов: от появления до наших дней
Аннотация: в данной статье приведена ТРИЗ-эволюция систем управления беспилотными летательными аппаратами, начиная с первых и заканчивая современными, с их описанием, техническими противоречиями и возможным дальнейшим развитием.
Ключевые слова: система управления, беспилотный летательный аппарат, БПЛА.
Annotation: In this article we present TRIZ-evolution of control systems of unmanned aerial vehicles, that is starting with the original and ending with the modern, with their description, technical contradictions and possible further development.
Keywords: control system, unmanned aerial vehicle, UAV.
В настоящее время беспилотные летательные аппараты (БПЛА) достаточно сильно развиты и имеют широкий круг применений. За век своего существования БПЛА как увеличились в своих размера до десятков метров, так и уменьшились до нескольких миллиметров; их диапазон скорости, грузоподъёмности тоже существенно расширился.
Однако системы управления БПЛА неизменно развивались и продолжают развиваться. Рассмотрим эволюцию систем управления БПЛА, начиная от систем управления первых беспилотных «воздушных торпед» до систем управления современных беспилотников. Для современных БПЛА ограничимся мини и микро классами аппаратов (вес до 30 кг).
Как всегда бывает, первыми БПЛА разрабатывали военные, и только в XXI веке началось активное развитие БПЛА гражданского назначения.
Исторически первым БПЛА считается «Жук» Кеттеринга (см. рис. 1). Это один из первых успешных проектов беспилотного летательного средства. По заказу армии США в 1917 году изобретатель Чарльз Кеттеринг разработал свою экспериментальную беспилотную «воздушную торпеду», которая стала предшественником крылатых ракет. Целью было создать дешёвый и простой беспилотный самолёт-снаряд для армейского авиационного корпуса.

Рисунок 1 – Жук Кеттеринга.
Аппарат получился достаточно компактный, в отличие от «крылатой бомбы» Сперри, разрабатываемой и испытываемой в тоже время. «Жук» имел цилиндрический корпус из дерева, к которому крепилась бипланная V-образная коробка.
Беспилотное средство было оснащено дешёвым четырёхцилиндровым двигателем и инерциальной автоматической системой управления. После старта, питающийся электричеством от двигателя, гироскоп обеспечивал стабилизацию «Жука» по направлению [1]. Гироскоп был соединён с вакуум-пневматическим автопилотом (рис. 2), который осуществлял управление рулём направления. Блок-схема системы управления «Жука» представлена на рисунке 3.

Рисунок 2 – Вакуум-пневматический автопилот (пример)
Управление рулём высоты осуществлялось аналогичным образом, но датчиком в этом случае уже являлся барометрический альтиметр.
Перед стартом на беспилотном аппарате задавали значение высоты и максимальное количество оборотов пропеллера, что соответствовало пройденному расстоянию; раскручивали гироскоп. Запуск происходил с рельсовой катапульты, «Жук» выходил на заданную высоту и летел по прямой в сторону цели. Специальное устройство отсчитывало обороты пропеллера и по достижении нужного расстояния (количества оборотов пропеллера сравнялось с заданным), высвобождался пружинный механизм, который отключал двигатель и выбивал болты, держащие крылья. Корпус аппарата падал вниз и достигал цели.

Рисунок 3 – Блок-схема системы управления
«Жук» Кеттеринга предназначался для обстрела городов, крупных промышленных центров и мест сосредоточения войск противника на дистанции до 120 км. Он успешно прошёл испытания, в отличие от «воздушной торпеды» Сперри, и был прият на вооружение. Система показала себя лучше, успешней и дешевле предыдущих, но Первая мировая война закончилась, и заказ так и не был выполнен [1]. Всего было изготовлено 45 машин.
У «Жука» Кеттеринга были реализованы простейшие функции автопилота: управление рулём высоты и рулём направления, отсчитывание пройдённого расстояния, отключение двигателя и сброс крыльев. Неудачи в испытаниях были связаны с проблемами удержания аппарата на курсе. Аппарат мог отклониться от курса как при запуске с рельсовой катапульты, так и во время полёта. Кроме того, «воздушная торпеда» под действием ветра могла завалиться на крыло и упасть. Примитивный автопилот хоть и пытался придерживаться курса, но с сильными порывами ветра или ошибкой при запуске справиться не мог.
Представим алгоритм управления «Жука» Кеттеринга:
1) Перед стартом задавались максимальная высота и число оборов пропеллера.
2) Происходил запуск с рельсовой катапульты.
3) Аппарат выходил на заданную высоту (контроль высоты осуществлялся с помощью барометрического альтиметра).
4) Автопилот поддерживал неизменный курс благодаря воздействию гироскопа (полёт представлял собой движение по прямой).
5) При достижении заданного числа оборотов (нужного расстояния), происходило отключение двигателя и сброс крыльев. Корпус аппарата падал вертикально вниз в цель.
Аппарат имел малую дальность и мог двигаться только по прямой из пункта «А» в пункт «Б». Маршрут с большим количеством точек был невыполнимой задачей, как и возвращение аппарата на место старта.
Выявим технические противоречия (ТП), имеющиеся в описываемой системе, для единообразия в формулировках противоречий все рассматриваемы системы будем называть БПЛА:
ТП1. При повышении степени стабилизации БПЛА по крену, путём введения стабилизирующих элементов на крыльях, недопустимо повышается вес аппарата.
ТП2. При повышении степени стабилизации БПЛА по крену, путём введения стабилизирующих элементов на крыльях, недопустимо повышается сложность конструкции.
ТП3. При повышении степени стабилизации по курсу недопустимо уменьшается расстояние до цели.
ТП4. При повышении сложности маршрута недопустимо повышается сложность конструкции.
Противоречие ТП4 было разрешено использованием приёмов вынесения, непрерывности полезного действия, «посредника», путём замены инерциального автопилота на систему радиоуправления. Этап ТРИЗ-эволюции представлен на рисунке 4.

Рисунок 4 – Первый этап эволюции.
2. Новая веха: появление радиоуправляемых летательных аппаратов.
В 1930-х годах армия США получила предложения поставлять радиоуправляемые беспилотные самолёты для различных нужд. Среди компаний, сделавших предложение, была Radioplane Company. Основана она Дени Реджинальдом, бывшим пилотом британской королевской авиации, который эмигрировал в США и стал актёром, а позже основал магазин и компанию по производству радио моделей самолётов [2].
Radioplane Company предложила армии США линейку радиоуправляемых моделей самолётов, среди которых присутствовала модель Radioplane OQ-2 (рис. 5). Это первый дистанционно-пилотируемый летательный аппарат (ДПЛА), поступивший в массовое производство. В общем было произведено 15000 моделей. Эксплуатация проводилась вплоть до 1948 года [2].
Radioplane OQ-2 представлял собой самолёт-мишень для обучения зенитных расчётов. Длина – 2,65 м. Размах – 3,73 м. Взлётный вес – 47 кг. Максимальная скорость – 137 км/ч. Максимальное время полёта – 1 час.

Рисунок 5 – Внешний вид Radioplane OQ-2
Запуск происходил с катапульты, а управлялась беспилотная радио модель оператором с земли, который мог имитировать различный ситуации (например, заход истребителя для атаки). Если аппарат оставался цел после полёта, посадка происходила с помощью выбрасываемого парашюта и неубираемого шасси (было не у всех моделей), которое смягчало удар о землю. Блок-схема системы управления представления на рисунке 6.

Рисунок 6 – Блок-схема радиоуправления
Радиоуправление позволило беспилотникам следовать по сложным маршрутам и выполнять сложные манёвры в воздухе, превосходя в этом «Жука» Кеттеринга и «Крылатую торпеду» Сперри. Аппараты получили возможность возвращаться на стартовую позицию, что увеличило количество их использования. Малогабаритная конструкция Radioplane OQ-2 и простота позволили развивать ему большие скорости и покрывать большее расстояние. Однако появилась проблема с малым потолком использования в 2438 м.
Аппаратура того времени позволяла эффективно использовать Radioplane OQ-2 только в поле видимости оператора. Именно так оператор с земли мог производить управление беспилотником. Если аппарат вылетал из радиуса видимости, то его можно было контролировать только радаром, что не обеспечивало эффективного наблюдения и снижало точность позиционирования.
При рассмотрении Radioplane OQ-2 можно выявить следующие противоречия:
ТП5. При увеличении дальности, путём увеличения пунктов управления по маршруту движения радиоуправляемого аппарата, недопустимо увеличивается объём наземной аппаратуры управления.
ТП6. При увеличении дальности, путём увеличения пунктов управления по маршруту движения радиоуправляемого аппарата, недопустимо увеличивается количество персонала.
ТП7. При увеличении дальности, путём увеличения объёма топливного бака, недопустимо увеличивается вес.
Второй этап эволюции показан на рисунке 7.
Противоречие ТП7 было разрешено использованием приёмов вынесения, непрерывности полезного действия, «посредника».

Рисунок 7 – Второй этап эволюции
3. Разработки второй мировой войны.
Фау-1 – самолёт-снаряд, прообраз современных крылатый ракет, состоял на вооружении армии Германии в середине Второй мировой войны (рис. 8). Эта ракета создана в рамках проекта «Оружие возмездия». Проект беспилотного аппарата разработан немецкими конструкторами Робертом Луссером и Фритцем Госслау. Разработка производилась в период 1942-1944 гг [3].
Фау-1 была построена по самолётной схеме, в задней части корпуса над рулём курса крепился реактивный двигатель. В процессе разработки проекта появилась необходимость ввести стабилизаторы и гироскоп для стабилизации аппарата во время полёта.
На земле перед запуском беспилотному аппарату задавали значения высоты и курса, а так же дальность полёта. Наведение выполнялось по магнитному компасу. После пуска аппарата (производился с катапульты, либо с самолёта-носителя – модифицированного бомбардировщика Heinkel He 111 H-22) он летел с помощью автопилота по заданному курсу и на заранее определённой высоте. Стабилизация по курсу и тангажу осуществлялась на базе показаний 3-степенного гироскопа: по тангажу суммировались с показаниями барометрического датчика высоты; по курсу – со значениями угловых скоростей от двух 2-степенных гироскопов, используемых для уменьшения колебаний снаряда. Управление по крену отсутствовало, так как Фау-1 была достаточно устойчива вокруг продольной оси [3].

Рисунок 8 – Внешний вид Фау-1
Автопилот был пневматическим устройством, работающим на сжатом воздухе. Золотники пневматических машинок рулей курса и высоты приводились в действие воздушным давлением, в зависимости от показаний гироскопов. Сами гироскопы раскручивались также сжатым воздухом. Расстояние полёта задавалось на специальный механический счётчик, а прикреплённый на нос снаряда анемометр постепенно сводил значение к нулю. По достижении нулевого значения происходило разблокирование ударных взрывателей и отключение двигателя. Примерна блок-схема показана на рисунке 9.
Длина – 7.75 м. Размах крыльев – 5,3 (5,7) м. Максимальная скорость – 656 км/ч (по мере расходования топлива скорость доходила до 800 км/ч). Дальность доходила до 280 км.
Фау-1 могла летать только по прямой (как «Жук» Кеттеринга), однако покрывала большее расстояние и развивала гораздо большую скорость.

Рисунок 9 – Блок-схема системы управления.
После рассмотрения Фау-1 были выделены следующие технические противоречия:
ТП8. При упрощении процесса старта, путём отказа от катапульты, недопустимо увеличивается сложность конструкции.
ТП9. При увеличении сложности маршрута недопустимо увеличивается сложность оборудования.
ТП10. При увеличении сложности маршрута недопустимо увеличивается вес аппарата.
На основе вышеописанных противоречий выделен второй этап ТРИЗ-эволюции беспилотных летательных аппаратов (рис. 10).
Противоречия ТП8 и ТП9 были разрешены с помощью приёмов вынесения, непрерывности полезного действия, «посредника», путём замены самолётной схемы на вертолётную.

Рисунок 10 – Третий этап эволюции.
Проект американского беспилотного летательного аппарата, а если точнее бдеспилотного вертолёта. Gyrodyne QH-50 DASH – первый в мире беспилотный вертолёт принятый на вооружение (рис. 11). Первый его полёт состоялся в 1959 году, и вплоть до 1969, когда ВМС США отказались от проекта, было произведено 700 аппаратов различных модификация. Изначально проектировались как штатное противолодочное вооружение ракетных крейсеров [4].

Рисунок 11 – Внешний вид Gyrodyne QH-50 DASH
Вертолёт был в длину 3,9 м, в высоту 3 м.. Вес неснаряжённого и снаряжённого соответственно 537 кг. и 991кг. Максимальный взлётный вес 1046 кг. Максимальная скорость 148 км/ч. и дальность 132 км. Практический потолок 4939 м. На борту нёс 33,6 галлонов топлива [4].
В отличие от предыдущих систем, аппарату не требовалась взлётная полоса или оборудование (например, катапульта), а требовалась небольшая ровная поверхность.
Беспилотный вертолёт разрабатывался для старта с палубы корабля. Перед запуском к нему подвешивали торпеды.
Контроль управления вёлся с пульта оператора (блок-схема системы управления представлена на рис. 12). На пульт также приходили данные о состоянии аппарата, сигналы оружейной системы. В дальнейшем было предложено ввести два пульта управления. По требованию, один пульт должен был находиться на палубе, а другой в командном пункте.
Так как торпеды весили много, пришлось отказаться от телеаппаратуры. Поэтому запускали сразу два вертолёта: один с аппаратом обнаружения и целеуказания; второй с вооружением.
Проект Gyrodyne QH-50 DASH был отменён из-за несовершенства системы управления и конструктивных дефектов, почти половина аппаратов разбились. Во время полёта у беспилотного вертолёта могло произойти самопроизвольное отключение аппаратуры управления. Также сказалось начало войны во Вьетнаме. Но использование беспилотного вертолёта вплоть до 2006 года как учебное пособие, объект экспериментов и т.д.

Рисунок 12 – Блок-схема системы управления.
Выделим противоречия беспилотного вертолёта Gyrodyne QH-50 DASH:
ТП11. При уменьшении габаритов беспилотного аппарата недопустимо уменьшается показатель полезной нагрузки.
ТП12. При уменьшении габаритов беспилотного аппарата недопустимо уменьшается дальность полёта.
Противоречия ТП10 и ТП11 были разрешены с помощью приёмов вынесения, объединения, универсальности, замены механической схемы, путём создания доступных контроллеров полёта для авиамоделистов.
По этим противоречиям составим этап ТРИЗ-эволюции (рис. 13).

Рисунок 13 – Четвёртый этап эволюции.
5. «Беспилотники» в массы. Полётные контроллеры для моделирования.
В наше время беспилотные летательные аппараты перестали быть военными «игрушками». В начале XXI века всё больше и больше различных БПЛА находят применение в гражданских сферах: аэросъёмка, доставка грузов, отдых и досуг, образование и др. Появилось множество схем конструкций (мультикоптеры, самолётного типа и др.). Теперь их можно спокойно купить в магазинах или даже сделать самому при покупке определённых комплектующих. О них и пойдёт речь далее.
Полётный контроллер – это основная плата управления, обеспечивающая функционирование беспилотного летательного аппарата.
Одним из первых популярных полётных контроллеров XXI века был MultiWii (рис. 14). Это открытый проект полётного контроллера на основе Arduino (аппаратной вычислительной платформе, основными компонентами которой являются простая плата ввода/вывода и среда разработки на языке Processing/Wirin (Си подобный)). Используется как элемент системы управления самодельных беспилотных аппаратов (в частности для мультикоптеров). Название MultiWii исторически сложилось потому, что в первых версиях были задействованы гироскопы из контроллера к игровой консоли Nintendo Wii.

Рисунок 14 – Внешний вид платы MultiWii
В данный момент платформа поддерживает большое количество сенсоров. Изначально нужно было докупать гироскопы из контроллера Wii Motion Plus и акселерометр из контроллера Wii Nunchuk, однако сейчас этого делать не нужно.
Так как основой проекта служит Arduino, то подключаемые модули (GPS, радио передатчик и т.д.) совместимо с проектом полётного контроллера ArduPilot (подробнее о нём поговорим ниже). По своей сути это плата с контактами, а не готовая система управления, к которой радиолюбитель может присоединять различные модули (в соответствии с нужными целями). Есть возможность настроить управление по радио пульту (с помощью приемника/передатчика радиосвязи) либо простые функции автопилота, такие как движение по точкам (необходим модуль GPS) и удержание курса (магнитометр). Естественно всё это возможно только при правильной настройке контроллера.
Изначально на плате был 8-битный микроконтроллер ATMega328 (тактовая частота до 20MHz, FLASH-память 32кб, SRAM-память 2кб), либо ATMega2560 (тактовая частота 16MHz, FLASH-память 256кб, SRAM-память 8кб). Но, т. к. проект является открытым, появились любительские версии с 32-битным STM32. Так же присутствуют встроенные датчики MPU6050 (3-осевой гироскоп и 3-осевой акселерометр), BMP085 (барометр) и HMC5883L (электронный магнитный компас). Информация представлена в общем виде и может отличаться для различных версий плат.
На рисунке 15 показана блок-схема системы управления.
Предполагаемый алгоритм управления:
1) Необходимо подключить все необходимые для задачи пользователя модули, предварительно записав программу в микроконтроллер (официальную или самодельную).
2) Далее следует подключить полётный контроллер к питанию и включить.
3) В зависимости от конструкции беспилотного аппарата, следует произвести запуск.
Полётные контроллеры в основном предназначались для радиоуправления. Хоть они и поддерживали некоторые функции автопилота, оператору приходилось контролировать полёт. Например, двигаясь по точкам маршрута, летающий аппарата может врезаться в возникшее препятствие, если не будет принято своевременных мер. Это относится и к остальным моделям полётных контроллеров, описанных ниже.

Рисунок 15 – Блок-схема системы управления.
В системе выявлены следующие противоречия:
ТП13. При повышении гибкости настройки управления контроллера недопустимо повышается сложность кода.
ТП14. При повышении гибкости настройки управления контроллера недопустимо повышается количество часов, требуемых на это.
Противоречия ТП13 и ТП14 были разрешены с помощью приёмов вынесения, объединения, универсальности, замены механической схемы.
Этап эволюции показан на рисунке 16.

Рисунок 16 – Пятый этап эволюции.
Контроллер CopterControl3D (CC3D) создан в рамках открытого проекта Open Pilot,начатого в 2009 году (рис. 17). Как и MultiWii является небольшой и относительно дешевой программируемой платой, но в отличие от неё разрабатывался специально для квадрокоптеров. Так же получил своё программное обеспечение OpenPilot GCS для настройки. Примерно 90% квадрокоптеров используемых для управления First Person Viev (FPV, вид от первого лица – управление осуществляется не только по радио каналу, но и по дополнительному каналу принимается на экран видео в реальном времени) собираются любителями именно на этом контроллере.

Рисунок 17 – Внешний вид платы CC3D
На плате присутствует 32-битный микроконтроллер STM32F103 72MHz с FLASH-памятью 128кб и чип MPU6000 (совмещает 3-осевой гироскоп и 3-осевой акселерометр).
Информация представлена в общем виде и может отличаться для различных версий плат.
Блок-схема системы управления показана на рисунке 18 (отличия только в интерфейсах подключения устройств).

Рисунок 18 – Блок-схема системы управления
В системе выявлены следующие противоречия:
ТП15. При повышении гибкости управления контроллера, путём добавления функций автопилота, недопустимо повышается сложность кода.
ТП16. При повышении универсальности использования контроллера недопустимо повышается сложность кода.
Противоречия ТП15 и ТП16 были разрешены с помощью приёмов вынесения, универсальности, самообслуживания, «посредника».
Этап эволюции представлен на рисунке 19.

Рисунок 19 – Шестой этап эволюции
Полётный контроллер ArduPilot Mega (рис. 20), разработанный компанией Arduino. Главным отличием от предыдущих является поддержка не только летающих беспилотных аппаратов, но наземных и лодочных систем. Так же помимо радиоуправляемого дистанционного пилотирования – автоматическое управление по заранее созданному маршруту, т.е. полет по точкам, а так же обладает возможностью двухсторонней передачей телеметрических данных с борта на наземную станцию (телефон, планшет, ноутбук и т.д.) и ведение журнала во встроенную память.

Рисунок 20 – Внешний вид платы
Контроллер поддерживает программирование, как и прочие продукты Arduino, язык программирования Arduino (является стандартным C++ с некоторыми особенностями). При грамотной настройке позволяет превратить любой аппарат в автономное средство и эффективно использовать его не только в развлекательных целях, но и для выполнения профессиональных проектов. По сравнению с вышеописанными платами более стабильно ведёт себя во время полёта, может неплохо выполнять некоторые фигуры полёта.
Контроллер поддерживает авиасимулятор через ПО Mission Planner, который позволят настроить управление, проложить маршрут и т.д.
На плате установлен микроконтроллеры ATMega2560 и ATMega32U2 (8-битный, тактовая частота 16 MHz, FLASH-память 32кб, SRAM-память 1 кб), датчики MPU6000 и MS5611 (барометр).
Блок-схема системы управления показана на рисунке 21.

Рисунок 21 – Блок-схема системы управления.
В рассмотренной системе были выявлены следующее противоречие:
ТП17. При повышении гибкости управления контроллера недопустимо уменьшается универсальность использования контроллера.
ТП18. При повышении качества платы недопустимо повышается цена.
ТП19. При повышении гибкости управления контроллера недопустимо повышается сложность схемы подключения периферии.
Противоречия ТП17 и ТП18 были разрешены с помощью приёмов объединения, дешёвой замены, универсальности, путём создания универсального полётного контроллера.
На рисунке 22 показан этап эволюции.

Рисунок 22 – Седьмой этап эволюции.
Pixhawk – полетный контроллер нового поколения (рис. 23), дальнейшая разработка проекта PX4 и программного кода Ardupilot от 3DRobotics. В контроллере присутствует операционная система реального времени NuttX.
Контроллер поддерживает большое количество систем:
наземные, воздушные, наводные. Поддерживает различные модули и стандарты для их связи. Из-за своей универсальности и стал популярным. Поддерживает использование ПО Mission Planner как ArduPilot.

Рисунок 23 – Внешний вид контроллера Pixhawk
На плате установлен 32-битный микропроцессор STM32F427 Cortex M4 (168MHz, FLASH-память 2 Мб, RAM- память 256кб) и 32-битный сопроцессор STM32F103. Так же присутствуют датчики: ST Micro L3GD 20 – 3-осевой гироскоп, ST Micro LSM303D – 3-осевой акселерометр/магнитометр, MPU6000 — 3-осевой акселерометр/гироскоп, MEAS MS5611 – барометр.
Блок-схема системы управления показана на рисунке 24.

Рисунок 24 – Блок-схема системы управления.
Выявим противоречия описанной системы:
ТП20. При повышении гибкости управления аппарата недопустимо повышается сложность аппаратуры управления.
Противоречия ТП20 были разрешены с помощью приёмов объединения, универсальности, путём создания многофункционального БПЛА с открытым кодом для любительских разработок.
Этап эволюции представлен на рисунке 25.

Рисунок 25 – Восьмой этап эволюции.
В 2010 году французская фирма Parrot выпустила на рынок свой беспилотный летательный аппарат AR.Drone. Через пару лет была выпущена обновлённая версия Parrot AR.Drone 2.0 (рис. 29). Проект квадрокоптера был полностью открыт для идей пользователей, что помогло ему стать хитом.
У Parrot AR.Drone 2.0 имеются четыре мотора мощностью 14,5 Вт. Максимальная скорость – 18 км/ч. Масса дополнительной полезной нагрузки – 150 г. Процессор ARM Cortex A8 с частотой 1 ГГц. с 800 Гц. DSP TMS320DMC64x для обработки видео сигналов. RAM DDR2 1Гбит. Две камеры: основная для съёмки и режима FPV с разрешением 720p; дополнительная камера с разрешением 240p для измерения горизонтальной скорости, расположена снизу.Wi-Fi точка для подключения устройства управления (смартфон или планшет с ОС Android или iOS) [9].

Рисунок 29 – Внешний вид Parrot AR.Drone 2.0
Открытость проекта позволяет к готовому аппарату подключать дополнительные компоненты. Это была одна из привлекательных черт описываемого квадрокоптера. Также пользователи могли программировать его полётный контроллер, либо создавать различные приложения для управления на языках C, Java и Objectiv-C.
Примерная блок-схема управления представлена на рисунке 30.
Одна из главных проблем всех беспилотных летающих аппаратов заключается в том, что если во время режима автопилота перед ними возникнет препятствие (будь то стена, дерево, другой летающий аппарат или даже человек) столкновения не избежать. Максимум на что можно рассчитывать, что БПЛА попытается остановиться или оператор вовремя вмешается в процесс. Однако, если прогнозы развития верны и в ближайшее время нас ожидает дальнейшее развитие рынка беспилотных летательных аппаратов, эта проблема будет всё больше набирать актуальность.

Рисунок 30 – Блок-схема системы управления.
ТП21. При добавлении дополнительной аппаратуры, повышающей функционал автопилота, недопустимо повышается вес аппарата.
Дальнейшее развитие беспилотных систем, в том числе БПЛА, заключается во внедрении в систему управления искусственного интеллекта. Интеллектуальная система управления позволит ещё больше развить функции автопилота, автоматизировать беспилотные аппараты. При этом действия оператора сводятся только к подготовке аппарату к началу полёта и непосредственно к самому запуску.
Но возникает техническое противоречие ТП21. Это противоречие разрешается принципами объединения, универсальности, непрерывности полезного действия, «посредника».
Интеллектуальную систему управления можно реализовать на микропроцессорном компьютере (например, Raspberry Pi) с несколькими датчиками (2 видео камеры и лидар). Такая система при движении по заданному маршруту сможет определить появившееся препятствие, которым может быть человек, другой БПЛА или дерево, стена, которые не заметил оператор при составлении маршрута. Данная система будет распознавать объекты методом компьютерного зрения и определять вектор движения этих объектов. После определения вектора движения, система сравнит его с вектором БПЛА и построит маршрут уклонения с минимальным уходом с маршрута. Такая схема несильно повлияет свои весом на характеристики беспилотного летательного аппарата, но значительно повысит степень его «выживаемости».
[1] Куда полетит беспилотник без пилота – День за днем [электронный ресурс] // LIVEJOURNAL.COM : Живой журнал. – Электрон. данные. URL: http://novser.livejournal.com/929399.html (дата обращения 14.11.2016 г.). – Заглавие с экрана. [2] OQ-2 [электронный ресурс] // AVIA.PRO : Новости авиации. – Электрон. данные. URL: http://avia.pro/blog/oq-2
(дата обращения 14.11.2016 г.). – Заглавие с экрана.
[3] Фау-1 [электронный ресурс] // ANAGA.RU : Информационный портал «Столичный комитет». 2008 г. – Электрон. данные. URL: http://anaga.ru/v-1.htm (дата обращения17.12.2016 г.). – Заглавие с экрана. [4] Gyrodyne Helicopter Co. Mfg of QH-50 series of VTOL
UAVs. [электронный ресурс] // GYRODYNEHELICOPT ERS.COM : Информационный сайт. – Электрон. данные. URL: http://www.gyrodynehelicopters.com/dash_weapon_system.htm
(дата обращения 14.11.2016 г.). – Заглавие с экрана.
[5] AR.Drone 2.0: обзор возможностей и дополнений [электронный ресурс] // XAKER.RU : Электронный журнал. – Электрон. данные. URL: https://xakep.ru/2012/11/11/ar-drone-2-0/(дата обращения 24.12.2016 г.). – Заглавие с экрана.
Российские беспилотники получат зрение
Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики (ЦНИИ РТК) по заказу Минобороны России разрабатывает новую систему ориентации для воздушных, наземных и подводных беспилотников. Как сообщают «Известия», испытания оснащенных ею дронов уже начались.
В настоящее время для ориентации беспилотников в пространстве используется либо GPS/ГЛОНАСС (спутники), либо инерциальная система гироскопов, «считающих» свои обороты в зависимости от передвижений аппарата в ту или иную сторону. Спутники ненадежны тем, что в плохую погоду их сигналы могут «не проходить», а под водой или в тесной застройке толку от них может не быть и при ясном небе. Инерциальная навигация без внешней коррекции может быстро накапливать ошибки, а действительно точные устройства для нее довольно громоздки и дороги.
Лучшим выходом была бы разработка третьей, корректирующей системы навигации, не зависящей от внешних факторов — например, технически воспроизводящей то, как ориентируется на местности сам человек. По замыслу разработчиков, их система компьютерного зрения будет сопоставима по своим возможностям с человеческим глазом. Она сможет сравнивать фотографии местности из популярных онлайн-сервисов (Google и «Яндекс») с тем, что «видит» сама с помощью стереокамер, что и даст возможность эффективно ориентироваться на местности.
В настоящий момент эксперименты по автономной навигации для военных беспилотников уже начались. Планируется, что первые роботы с новой автономной системой управления поступят в войска к 2021 году (сперва — в опытную эксплуатацию). Среди основных сложностей на этом пути — доработка системы технического зрения до уровня, сравнимого с человеком и дополнение ее элементами искусственного интеллекта. Без него не обойтись в «опознании» местности по фотографиям.
В рамках проекта создается алгоритм, который позволит дронам действовать в группе. В районе выполнения задачи какой-либо один беспилотник будет ориентироваться по существующим фото, делать собственные снимки местности и наносить новые данные с новыми ориентирами на карту, доступную, благодаря объединению в единую сеть, для всех аппаратов. С каждым новым полетом над одним районом его трехмерная карта станет все более подробной. В теории системы привязки по ориентирам в полете позволят обеспечить достаточную точность для навигации беспилотников. По крайне мере, если картографические данные по этой местности достаточно актуальны.
Сходные разработки ведутся и за рубежом. В последнее десятилетие активно совершенствуются методы так называемого одновременного картографирования и ориентации по данным с одной или нескольких камер (SLAM — от англ. Simultaneous Localization and Mapping). Одно из главных препятствий на этом пути — то, что системам технического зрения, как правило, не хватает «интеллекта». Два наиболее известных инцидента, в которых это проявилось — гибель двух водителей Tesla. Первый случилась в 2016 году из-за того, что автопилот в первом случае не смог отличить белую цистерну бензовоза от яркого дневного неба, на фоне которого он увидел эту цистерну. Вторая — из-за «изменения ландшафта» — в ходе предыдущего ДТП грузовик разбил бетонную разделительную на трассе, а машина не смогла учесть такое изменение.
Поэтому для создания действительно эффективного технического зрения нужна система «искусственного интеллекта», способного учитывать описанные выше ситуации. Нужны какие-то нетривиальные решения. Та же Tesla активно пользуется нейронными сетями, обученные на основе массива данных, полученных от водителей-людей (через камеры, загружающие видеозаписи вождения обычных водителей на сервера Tesla). Однако для автономных систем навигации беспилотников все несколько сложнее. Часто они не могут воспользоваться опытом людей-операторов, поскольку среда, в которой они работают, значительно сложнее дорожной ситуации, и математическая формализация происходящего для летающего дрона намного сложнее.
Хотя пока автономная система навигации разрабатывается в нашей стране только для военных беспилотников, несомненно, что аналогичные задачи вскоре станут актуальны и для дронов гражданских. Недавнее крушение БПЛА «Почты России» указывает на необходимость улучшения технического зрения и для «мирных» беспилотников — например, доставляющих небольшие грузы и посылки в городских условиях, где плотная застройка часто делает ориентацию по одним только спутникам ненадежной.
Автономная система ориентирования беспилотного летательного аппарата: состав и схема функционирования в формате 3D

Рубрика: Технические науки
Дата публикации: 13.12.2017 2017-12-13
Статья просмотрена: 828 раз
Библиографическое описание:
Буянов И. А., Исламов В. К. Автономная система ориентирования беспилотного летательного аппарата: состав и схема функционирования в формате 3D // Молодой ученый. 2017. №50. С. 24-30. URL https://moluch.ru/archive/184/47140/ (дата обращения: 29.04.2019).
Для решения задач мониторинга территорий и объектов, как в военной, так и в гражданской сфере применяются сверхлегкие беспилотные летательные аппараты. Главным критерием гарантии выполнения поставленной задачи является точность его позиционирования в пространстве.
Как правило, основным оборудованием для определения местоположения беспилотного летательного аппарата является GPS/ГЛОНАСС приёмник. Использование автономной системы ориентирования и методов обработки изображений и распознавания объектов, являются альтернативой спутниковым системам и технологиям навигации и наведения.
В данной статье изложены основные результаты исследований в области системного инжиниринга и проектирования, сложных приборно-функциональных систем. Проведен анализ инженерных решений, характеристик и возможностей построения систем навигации, ориентирования и наведения БЛА с лазерным приборным модулем. Предложена схема построения и алгоритм функционирования бортового модуля, включающего камеру, лазерный сканер и инерциальный измерительный блок. Приборы работают совместно, синхронно и создают в формате 3D зону с характерными точками вокруг БЛА.
Ключевые слова: беспилотный летательный аппарат (БЛА), навигационная система, автономная система ориентирования, камера, лазерный сканер, эталонное изображение, дальномеры, формат 3D.
С середины 1990-х годов благодаря появлению и началу эксплуатации Глобальной навигационной спутниковой системы GPS США стали стремительно развиваться беспилотные летательные аппараты (БЛА). Современные беспилотные машины предназначены для совершения полётов в воздушном пространстве (атмосфере) и выполнения различных задач. Отличительной чертой данного вида авиационной техники является отсутствие человека, экипажа на борту.
По сообщениям зарубежных и отечественных средств массовой информации, основным предназначением беспилотных комплексов является ведение воздушной разведки. Беспилотные машины могут оказать действенную помощь во время катаклизмов, в случаях обнаружения и ликвидации последствий, геофизических и техногенных катастроф: вести съёмку местности, находить пострадавших людей, доставлять им еду и медикаменты, патрулировать маршруты движения транспорта, осуществлять мониторинг зданий и промышленных сооружений, уточнять состояние объектов энергетики, инфраструктуры и коммуникаций [1, 2].
Для определения местоположения и управления полётом БЛА используются американская система глобального позиционирования GPS, российский аналог — ГЛОНАСС, которые обеспечивают высокую навигационную точность. Отклонения позиционирования аппаратов в полёте не превышают 10 метров [2]. Однако существуют зоны и места, в которых из-за искусственных и естественных помех сигналы GPS недоступны или имеют низкое качество приёма, например, в городах с высотными застройками и источниками (полями) сильного электромагнитного излучения. Возникает необходимость применения средств и методов управления, информационно-сигнального обеспечения, навигации и ориентирования роботизированных летательных аппаратов, прежде всего малоразмерных и маловысотных БЛА без привязки к спутниковым системам. К одним из таких средств могут относиться предназначенные для применения в специализированных навигационных системах или комплексах с БЛА оптико-электронные системы с лазерными приборами и устройствами, обеспечивающими управляемый полёт с построением и реализацией 3D моделей местности и пространства.
Сегодня беспилотные машины строятся с использованием разнообразных аэродинамических схем и функциональных компонентов. В зависимости от используемой системы управления они подразделяются на два класса: БЛА с автоматизированным радиокомандным управлением и БЛА с системами программного управления. Особенностью аппаратов с дистанционным управлением (1 класса) является участие в процессе управления полётом человека-оператора, который располагается, как правило, в наземном пункте управления. Программно-пилотируемые БЛА (2 класса) — автономные воздушные роботы. Они способны совершать полёт и решать задачи по заранее составленной программе без участия человека-оператора [1, 2].
Подавляющее большинство созданных и применяемых образцов БЛА имеют радиокомандную и комбинированную системы управления. Как сообщали зарубежные источники, при эксплуатации БЛА возникают трудности, связанные с управлением аппаратами в воздухе. Значительное число аварий машин произошли из-за ошибок операторов. По данным ВВС США, за 2012 год потери составили 70 беспилотных самолётов. Они объясняются, в первую очередь ошибками и недостаточным уровнем подготовки операторов. Радиоуправление остаётся задачей, решение которой требует достижения высоких профессиональных навыков. Например, в армии США операторами БЛА становятся действующие пилоты ВВС после годичной переподготовки [3].
Проектирование, построение и применение полностью автономных воздушных роботов, «умных» БЛА различного назначения является одним из приоритетных направлений развития авиационной техники и технологий двойного назначения. Многие производители пытаются создать программно-пилотируемые аппараты с применением искусственного интеллекта. При этом большую роль играет совершенствование оптико-электронных систем, создание и внедрение приборов и технологий 3D моделирования местности, получения голографических изображений объектов, миниатюрных комплексов сверхскоростной обработки и передачи информации.
Цель работы — на основе принципов системного инжиниринга и методов проектирования оптико-электронных систем определить состав и схему функционирования автономной лазерной системы ориентирования БЛА для моделирования процессов управления полётом и оценки параметров функционирования воздушных роботов в формате 3D.
АСО БЛА являются одним из главных средств развития автоматических систем управления движением в условиях, когда объём поучаемой информации в полёте минимален и для решения задач управления необходимо проводить анализ внешней обстановки в режиме реального времени [4].
АСО находят применение в современных космических, авиационных, наземных, надводных и подводных мобильных объектах. Поэтому определение позиционирования и построение маршрута БЛА при помощи АСО на основе 3D моделирования, является актуальной темой для исследования.
Использование технологий АСО для управления инаведения БЛА
Использование технологий АСО и методы обработки изображений и распознавания образов в формате 3D, являются альтернативой GPS/ГЛОНАСС технологиям систем навигации и наведения БЛА.
Понятие «D» (от англ. Dimension — измерение), где разделяют:
‒ 1D — одномерное пространство с одной пространственной характеристикой — длина;
‒ 2D — двухмерное пространство с двумя пространственными характеристиками — длина и ширина;
‒ 3D — трёхмерное пространство с тремя пространственными характеристиками — длина, ширина и высота.
Таким образом, представление объектов в 2D является плоским, а в 3D многомерным.
Для ориентации в пространстве используются различные АСО: дальномеры, сонары, стереозрение и прочее. Сканирующие сонары и дальномеры формируют области точек, которые они получили. Стереозрение формирует видеоинформацию с каждой видеокамеры стереопары.
На рис.1 показана принципиальная схема передачи изображения от датчика до устройства предобработки и процессор, информация от которого поступает к системе управления и оператору.
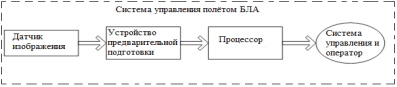
Рис. 1. Состав и принципиальная схема работы ОЭС БЛА
Основные задачи, возлагаемые на ОЭС с лазерными приборами, относят [5]:
‒ формирование модели окружающей внешней среды;
‒ фиксирование отдельных объектов и определение их параметров;
‒ идентификация критических (опасных) объектов при выполнении поставленных задач полёта.
Сущность технологии АСО для ориентирования и наведения БЛА заключается в сопоставлении текущего и эталонного изображений, с локализацией и сенсоризацией на текущем изображении заданных объектов и определением значений текущих координат этих объектов для формирования сигналов управлении полётом летательного аппарат с использованием:
‒ априорной информации для построения эталонного изображения;
‒ апостериорной информации, представляющей собой текущее и изображение на выходе.
На рис. 2 показаны состав и структурно-функциональная схема автономной системы наведения [2].
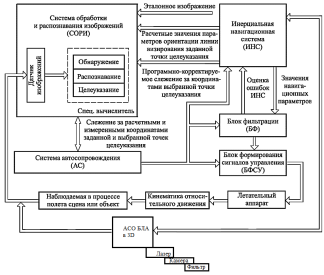
Рис. 2. Состав и структурно-функциональная схема наведения БЛА и место в ней АСО
Процесс формирования эталонных изображений объектов ориентирования в формате 3D можно представить в виде поэтапного выполнения следующих процедур (рис. 3):
1-й этап — Выбор объекта изображения;
2-й этап — формирование форма 2D (2D-описание);
3-й этап — Преобразование рассеянного изображения в трехмерные структуры (3D-описание);
4-й этап — получение трехмерной геометрической модели.
Начальное входное изображение может представлять собой одиночное черно-белое или цветное изображение, стереопару. Примером двумерных элементов, выделенных из исходного изображения, могут служить вершины объектов, линии и области равномерной яркостной интенсивности. К трехмерным структурам, соответствующим двумерным элементам предыдущего уровня, относятся возвышения, границы объектов, участки земной поверхности и т. п.

Рис. 3. Схема формирования реального изображения в АСО в формате 3D
При построении таких структур из двумерных элементов суммируются данные о разрешающей способности аппаратуры, знания о рассматриваемой области и данные, полученные из изображения, что позволяет получить в результате преобразований на 3 этапе трёхмерное так называемое «рассеянное» контурное изображение сцены. При построении геометрической модели из набора трёхмерных структурных компонентов используются методы описания границ, поверхностей, объёмов [6].
Лазерные приборы иошибки измерений вформате 3D
В качестве средств для создания 3D модели окружающего пространства могут рассматриваться лазерные дальномеры японского и американского производства. На сегодняшний день перспективными являются АСО на базе сканирующих лазерных дальномеров — 2D или 3D лазерных дальномеров (рис.4) [7,8].

Рис. 4. Внешних вид лазерных дальномеров
Основные технические характеристики лазерных дальномеров приведены в таблице 1.
Технические характеристики лазерных дальномеров
- http://russiandrone.ru/publications/evolyutsiya-sistem-upravleniya-bespilotnykh-letatelnykh-apparatov-ot-poyavleniya-do-nashikh-dney-aerogeo/
- http://chrdk.ru/news/rossiiskie-bespilotniki-poluchat-zrenie
- http://moluch.ru/archive/184/47140/